ГЛОНАСС умеет быть высокоточным
Российская навигационная спутниковая система ГЛОНАСС («Ураган» – первоначальное военное обозначение ГЛОНАСС) была развёрнута ещё в 1996 году, однако, в силу проблем финансового характера, в последующее десятилетие утратила полноту орбитальной группировки. Как следствие, большинство производителей спутниковой аппаратуры сместили ГЛОНАСС на вспомогательные роли. Сложилось предвзятое отношение и к возможности использовать сигнал ГЛОНАСС для высокоточных определений. У многих производителей двухсистемных приёмников опция ГЛОНАСС не самостоятельная, и при отсутствии сигналов GPS местоположение определить невозможно.
В настоящее время орбитальная группировка восстановлена, сигнал со спутников стал тестироваться должным образом, на пути актуализации системы остался только скептицизм пользователей. Чтобы его разрушить, в 2011 году Российским институтом радионавигации и времени (РИРВ) и Московским государственным университетом геодезии и картографии (МИИГАиК) при поддержке Ассоциации «ГЛОНАСС/ГНСС-Форум» и содействии ОАО «НТЦ «Интернавигация» проведён ряд совместных экспериментов в области высокоточных ГЛОНАСС/GPS-измерений.
Начиная с 1995 г., на производственной базе РИРВ начат выпуск одночастотной спутниковой геодезической аппаратуры, работающей по сигналам ГЛОНАСС/GPS: «Землемер-Л1М», «ГЕО-161», «ГЕОДЕЗИЯ». В 2006 г. разработаны и с этого времени серийно производятся двухчастотные приёмники, позволяющие работать в режиме реального времени: «ГККС», «Изыскание». На сегодняшний день готова к серийному выпуску аппаратура третьего поколения: контрольно-корректирующая станция «МГККС» и ровер «Изыскание-М» (рис. 1), а также приёмник для прецизионных геодинамических наблюдений «Гео-П» и экономичный сетевой вариант базовой станции «СБС-363». Точностные характеристики этой аппаратуры соответствуют мировым стандартам. В состав аппаратуры входит специальное программное обеспечение обработки измерительной информации.

Среднеквадратическая погрешность определения координат составляет:
• в постобработке – 2 мм + 0,5 ppm;
• в режиме реального времени на расстоянии 10 км – 10 мм в плане и 15 мм по высоте;
В режиме прецизионных автономных определений PPP (Precise Point Positioning) обеспечивается сантиметровая точность позиционирования.
В ходе экспериментов оценивалась точность определения вектора между двумя пунктами, расположенными на большом расстоянии (~ 635 км), в режиме «статика» по двум системам (GPS и ГЛОНАСС) и только по системе ГЛОНАСС с использованием отечественной аппаратуры и программного обеспечения. Также проведён сравнительный анализ точностных характеристик доступного программного обеспечения постобработки измерений, в том числе программ фирм ASHTECH, TOPCON, NOVATEL, LEICA, РИРВ, по сигналам GPS + ГЛОНАСС, GPS, ГЛОНАСС.
Эксперименты проводились на созданных базисах между Москвой (здания главного корпуса МИИГАиК и Центром топогеодезического и навигационного обеспечения 27 ЦНИИ Минобороны России) и Санкт-Петербургом (здание ОАО «РИРВ»). Измерения выполнялись аппаратурой РИРВ «ГККС». Привязка пункта «РИРВ» производилась от станций ITRF «Светлое» и «Пулково» по суточным сеансам. Невязка по координатам от этих станций составила 2,8 см. Привязка пунктов «МИИГАиК» и «29 НИИ» производилась от станций ITRF «Менделеево» и «Звенигород». Невязка по координатам от этих станций составила 3,5 см.
Были проведены три сеанса измерений продолжительностью 8 часов каждый, в «статике» с использованием точных эфемерид ГЛОНАСС и GPS. Обработка проводилась программным продуктом РИРВ «BL-GEO3». Результаты апостериорной оценки точности определения приращений координат, полученные при использовании только системы ГЛОНАСС, приведены в таблице 1.

Таблица 1. Погрешности определения разностей координат.
С учётом погрешности привязки точек базиса (2…5 см) погрешность плановых координат можно оценить в 4-6 см (что составляет ~ 0,1 ppm). Обратим внимание, что погрешность определения высотной составляющей первых двух сеансов заметно превышает аналогичную погрешность третьего сеанса, что обусловлено особенностями учёта влияния тропосферы. Во всех сеансах использовалась модель тропосферной коррекции Саастамойнена, однако в первых двух это делалось без учёта, а в третьем – с учётом фактических метеоданных, что позволило более чем в два раза повысить точность местоопределения по высоте. Как показывает таблица 1, отдельно взятая система ГЛОНАСС позволяет, при достаточно тщательном учёте метеоусловий, определять длинные базисные векторы с удовлетворительной точностью – погрешности на уровне первых единиц сантиметров. Однако при этом точность, обеспечиваемая только системой ГЛОНАСС, всё же несколько уступает точности, полученной только по системе GPS, и точности, полученной при совместном применении двух систем ГЛОНАСС и GPS.
Таким образом, создаётся впечатление, что система GPS как бы «вытягивает» точность совместного координатного решения на более высокий уровень.
Действительно, в отличие от GPS, в системе ГЛОНАСС используется частотное разделение навигационных сигналов (разделение по несущей частоте навигационного сигнала между спутниками). При высокоточном геодезическом определении координат (точность – первые миллиметры) участвуют фазовые псевдодальности и используется алгоритм нахождения целочисленной неоднозначности фазовых циклов вторых разностей измерений, которая связана с длиной волны радиоизлучения каждого спутника. Если у спутников GPS длины волн на каждой из передаваемых частот радиосигналов одинаковы, то для ГЛОНАСС они разные. Для учёта этой особенности существующей орбитальной группировки ГЛОНАСС требуется использование таких алгоритмов и программ обработки данных, в которых с достаточной полнотой компенсируются систематические погрешности, возникающие при нахождении целочисленной неоднозначности фазовых циклов.
В связи с этим в ходе исследований проведён сравнительный анализ программ постобработки измерительной информации ГЛОНАСС, GPS и ГЛОНАСС/GPS. Методика исследования базировалась на запатентованном способе оценки точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы глобальных навигационных спутниковых систем [1].
Для набора измерительной информации использовался запатентованный стенд тестирования высокоточной геодезической спутниковой аппаратуры с мобильным линейно изменяемым базисом (патент на полезную модель № 106391 от 10.07.2011г.). Основным принципом работы стенда является сравнение измеренных с помощью тестируемой аппаратуры приращений топоцентрических координат с линейным изменением длины базиса в плане и по высоте (рис. 2). Передвигая антенну ровера в определённом направлении на несколько мм, можно сравнивать результаты спутниковых и линейных измерений.
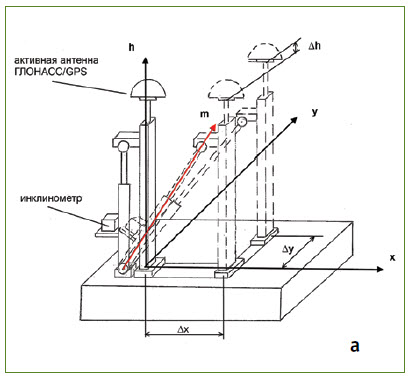

Рис. 2. Стенд тестирования геодезической спутниковой аппаратуры (а – схема работы; б – общий вид).
Измерения проводились на двух частотах с использованием спутниковой геодезической аппаратуры «ГККС-Изыскания» на базисе длиной 5 км. Интервал измерений составлял 5 сек. Было набрано 20 сеансов измерений продолжительностью 30 мин. При этом наблюдались созвездия GPS и ГЛОНАСС. Антенна ровера между сеансами последовательно сдвигалась в горизонтальной плоскости на 3 мм в северном направлении и на 2 мм в восточном направлении от предыдущего положения. Таким образом, в каждом сеансе измерялись приращения топоцентрических координат текущего положения ровера относительно начального положения и сравнивались с номинальными значениями ![]() .
.
Обработка полученной информации базировалась на принципах, изложенных в работе [2]. Результаты обработки в виде стандартных отклонений ![]() представлены в таблице 2.
представлены в таблице 2.
Таблица 2. Стандартные отклонения погрешностей измерения приращений координат.(миллиметры)
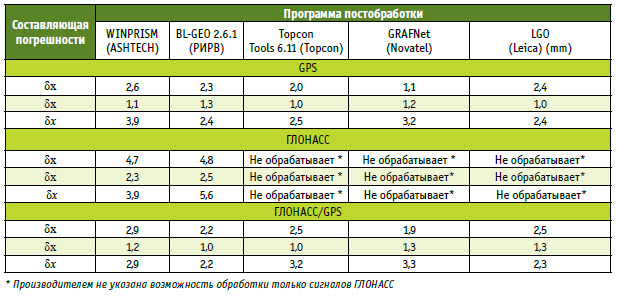
Эти данные характеризуют случайную составляющую погрешности измерений длины базисной линии в системах GPS, ГЛОНАСС и ГЛОНАСС/GPS. Судя по полученным оценкам, при совместном использовании двух систем её величина не превышает, в лучшем случае, 1 мм на километр в плане и 1.5…2 мм на км по высоте.
На основании анализа и обобщения результатов, полученных при проведении описанных экспериментов, могут быть сделаны следующие основные выводы:
- точностные характеристики, обеспечиваемые системой ГЛОНАСС на базисных линиях различной длины, от нескольких километров до нескольких сотен километров, свидетельствуют о возможности использования отечественной системы, как совместно с GPS, так и в отдельности, для производства высокоточных относительных координатных определений в геодезии и смежных областях. Реализовать эту возможность позволяет современная спутниковая геодезическая аппаратура;
- наиболее высокую точность координатных определений даёт совместное использование систем ГЛОНАСС и GPS. Преимущество совместного использования двух систем особенно заметно при сравнении с отдельно взятой системой ГЛОНАСС. Тем не менее, показательно то, что использование системы ГЛОНАСС, пусть даже и в дополнение к системе GPS, позволяет повысить точность определения координат. Более того, можно предположить, что именно во вспомогательной роли опций ГЛОНАСС и заключается причина ухудшения точности координатного решения. Одним из факторов, препятствующих полноценной реализации потенциала отечественной системы, в данном случае является повышенная сложность обработки фазовых измерений, обусловленная спецификой навигационных сигналов ГЛОНАСС, что предъявляет особые требования к программному обеспечению;
- выбор программного обеспечения оказывает существенное влияние на точностные характеристики результатов обработки спутниковых измерений. На сегодняшний день не все программы, в том числе и от ведущих мировых производителей, позволяют обрабатывать измерительную информацию ГЛОНАСС в отдельности. Однако, для того чтобы ещё более повысить конкурентоспособность системы ГЛОНАСС в геодезии и смежных областях, отечественным разработчикам геодезической спутниковой аппаратуры и специального программного обеспечения необходимо приложить совместные усилия, направленные на дальнейшее совершенствование учёта тонких эффектов в процессе получения и обработки измерительной информации российской навигационной спутниковой системы, чему должно способствовать использование эталонных базисов и испытательного оборудования, описанного в данной статье.
Баздов Александр Константинович, начальник отдела стандартизации и сертификации ОАО «НТЦ «Интернавигация».
Зотов Владимир Николаевич, советник директора Московского филиала ОАО «РИРВ».
Непоклонов Виктор Борисович, заместитель исполнительного директора Ассоциации «ГЛОНАСС/ГНСС-Форум».
Свердлик Сергей Николаевич, главный специалист Московского филиала ОАО «РИРВ».
Царёв Виктор Михайлович, генеральный директор ОАО «Интернавигация».
Литература
1.Царёв В.М., Волченков В.П., Ковнир В.И., Баздов А.К., Селиванов А.Н., Свердлик С.Н., Михайлов С.В., Аверин С.В. Способ оценки точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы глобальных навигационных спутниковых систем // Патент России № 2446415. 2011.
2.Царёв В.М., Баздов А.К., Селиванов А.Н., Волченков В.П., Свердлик С.Н. Стенд тестирования и сертификации навигационной аппаратуры ФГУП НТЦ «Интернавигация» – Новости навигации, 2010, № 3. С 26–31.
Статья из журнала "Вестник ГЛОНАСС" Специальный выпуск. Апрель 2013
Перепечатка в полном или частичном виде возможна с обязательной активной ссылкой на источник vestnik-glonass.ru