Внимание – опасные грузы!
24 Июля 2014
В настоящее время ведётся разработка ряда автоматизированных систем экстренного реагирования на аварии автотранспортных средств. В США такая система входит в состав системы Next Generation 9-1-1 (NG9-1-1), предназначенной для вызова аварийных служб с использованием любых проводных и беспроводных коммуникационных устройств, в том числе через Интернет. Разработка системы финансируется Министерством транспорта США.
В рамках Европейского союза создаётся система eCall , ориентированная на автотранспортные средства и предполагающая использование европейской спутниковой навигационной системы Galileo. В России разрабатывается система «ЭРА ГЛОНАСС» аналогичного назначения.
В рамках этих проектов проведён большой объём работ по анализу возможностей использования различных средств связи, разработке протоколов взаимодействия, архитектуры систем и т.д. Однако пока не выработаны подходы к решению некоторых ключевых задач, в значительной степени определяющих эффективность указанных систем. К таким задачам относится определение перечня аварийных ситуаций, на которые должно обеспечиваться экстренное реагирование в автоматическом режиме, а также категорий транспортных средств (ТС), подлежащих оснащению соответствующей аппаратурой.
В европейском стандарте, устанавливающем требования к функционированию европейской системы eCall [3], содержится следующее требование: «Система должна обеспечивать реакцию на столь много различных видов аварий, насколько это возможно».
Перечень таких видов аварий и рекомендации по автоматической идентификации фактов аварий ТС различных категорий были предложены в работах [4–6] и приведены в табл. 1.

Как видно из таблицы, к ТС, перевозящим опасные грузы (ОГ), должен предъявляться наиболее полный набор требований по автоматическому определению факта аварии, что обусловлено следующими факторами:
1. Последствия аварий при перевозках опасных грузов отличаются, как правило, высокой тяжестью, во многом связанной со свойствами указанных грузов.
2. Последствия аварий при перевозках опасных грузов могут оказывать вредное воздействие не только на непосредственных участников происшествий, но и на людей, ТС и объекты, находящиеся вблизи места аварии.
3. Авария может произойти не одномоментно, а развиваться в течение относительно продолжительного времени и на относительно протяжённом участке местности, например при утечке опасной жидкости, газа или рассыпании опасного твёрдого вещества.
Анализ данных МВД России за 2005–2007 гг. о дорожно-транспортных происшествиях (ДТП), в результате которых погибли или получили ранения люди, с участием транспортных средств, перевозивших опасные грузы [7], показывает следующее.
В 2005–2007 годах в МВД России поступила информация о 219 дорожно-транспортных происшествиях с участием транспортных средств, перевозивших опасные грузы. В результате этих происшествий погибли 82 и получили ранения 159 человек, утрачено более 900 т. опасных грузов.
Тяжесть последствий происшествий при перевозках опасных грузов составила 34 погибших на 100 пострадавших, что более чем в три раза выше, чем в дорожно-транспортных происшествиях, не связанных с такими перевозками.
Основную часть опасных грузов, находившихся на транспортных средствах при происшествиях, составляли легковоспламеняющиеся вещества (дизельное топливо, бензин, нефть, пропан, метанол, изопропанол, этилацетат, газовый конденсат).
Доля ДТП при перевозке опасных грузов в цистернах составила 97,3% (рис. 1).
 Рисунок 1. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по способу перевозки.
Рисунок 1. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по способу перевозки.
Доля ДТП при перевозке в цистернах нефти и нефтепродуктов (дизельное топливо, бензин, керосин) составила 88,1% (рис. 2).
 Рисунок 2. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по видам перевозимых грузов.
Рисунок 2. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по видам перевозимых грузов.
На рис. 3 приведено распределение ДТП по видам происшествий.
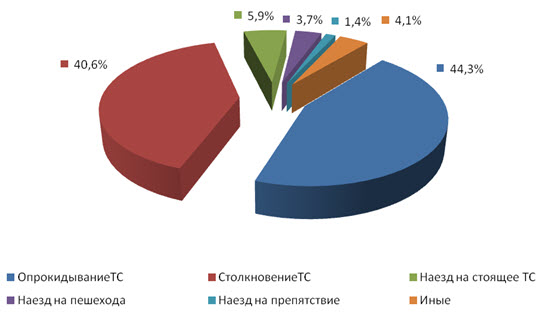
Как видно из представленных данных, наибольшую долю ДТП (44,3%) составляет опрокидывание ТС, несколько меньшую (40,6%) – столкновение ТС. Остальные виды ДТП в сумме составляют около 15%.
Как отмечается в [7], все опрокидывания (за исключением одного) произошли с транспортными средствами – цистернами (одиночное механическое транспортное средство или прицеп (полуприцеп) – цистерна в составе автопоезда), т.е. доля цистерн в количестве ТС, с которыми произошло опрокидывание, составила около 99%. При этом 84 происшествия (86%) связаны с несоблюдением водителями этих транспортных средств требований безопасности дорожного движения, 10 (10%) – с технической неисправностью транспортных средств. Каждое третье (29 из 84) опрокидывание произошло на криволинейных участках автодорог. В 85 из 97 опрокидываний (87%) происходила полная или частичная утрата опасных грузов. Всего при опрокидываниях было утрачено около 620 т. таких грузов, в среднем 7,3 т. на одно ДТП с утратой опасных грузов. В результате 12 опрокидываний (12%) происходило их возгорание.
Из общего количества столкновений 29 (33%) – явились следствием несоблюдения водителями транспортных средств с опасными грузами требований безопасности дорожного движения, 60 (67%) – водителями иных транспортных средств. В 31 из 89 столкновений (35%) происходила полная или частичная утрата опасных грузов. Всего при столкновениях было утрачено более 193 т. таких грузов, в среднем 6,2 т. на одно ДТП с утратой опасных грузов. В результате 6 столкновений (7%) происходило их возгорание.
Происшествия по местам совершения (рис. 4):
• вне населенных пунктов – 187 происшествий (85%);
• в населенных пунктах – 32 происшествия (15%).

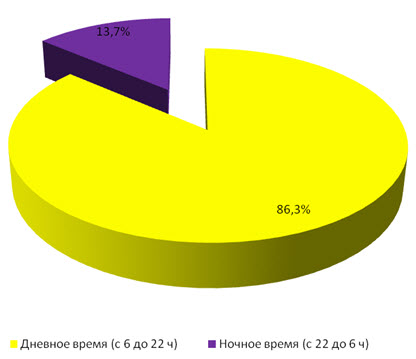
Происшествия по времени суток:
• дневное время (с 6 до 22 ч) – 189 происшествий (86%);
• ночное время (с 22 до 6 ч) – 30 происшествий (14%).
Водители транспортных средств с опасными грузами, участвовавшие в происшествиях, как правило, имели свидетельства о прохождении соответствующей специальной подготовки. Исключение из этого положения составили 5 происшествий, в результате которых утрачено 54,1 т. опасных грузов.
Средний стаж работы водителей транспортных средств с опасными грузами, участвовавших в происшествиях, составил 17 лет.
Грубые нарушения режима труда и отдыха установлены в 8 происшествиях, когда водители без отдыха управляли транспортными средствами от 10 до 22 часов. В других происшествиях среднее время нахождения водителя за рулём составило около 3 часов.
Анализ вышеприведенных данных позволяет сделать следующие выводы.
1. Подавляющее большинство ДТП происходит при перевозке опасных грузов в цистернах.
2. Значительное большинство ДТП происходит при перевозке нефтепродуктов.
3. Наиболее частым видом ДТП при перевозке опасных грузов является опрокидывание транспортного средства, несколько менее частым – столкновение ТС.
4. Частым явлением, сопровождающим ДТП при перевозке опасных грузов, является возгорание опасного груза.
5. Значительное большинство ДТП происходит вне населенных пунктов.
6. Результатом многих ДТП является утрата значительных количеств перевозимых грузов.
Отсюда следует целесообразность принятия специальных мер по экстренному реагированию на аварии автотранспортных средств, перевозящих опасные грузы.
В России нормативными актами предусмотрено обязательное проведение мониторинга перевозок опасных грузов, который возложен на органы Ространснадзора и местные власти. Мониторинг осуществляется с помощью комплексной информационно-аналитической системы контроля транспортных средств (КИАСК-ТС), реализованной на основе спутниковых навигационных технологий ГЛОНАСС/GPS. Это соответствует следующему требованию пункта 1.10.3.3 ДОПОГ: «Если эта мера уместна и если уже установлено необходимое оборудование, должны использоваться системы телеметрии или другие методы или устройства, позволяющие отслеживать движение грузов повышенной опасности» [8].
Указанные меры предусматриваются при разработке ИТС многих стран.
В наиболее развитых зарубежных странах развитие телематических транспортных систем (ТТС) осуществляется под руководством правительственных органов на основе централизованно разработанных архитектур, охватывающих весьма широкий круг задач, в том числе и задачи контроля перевозок опасных грузов.
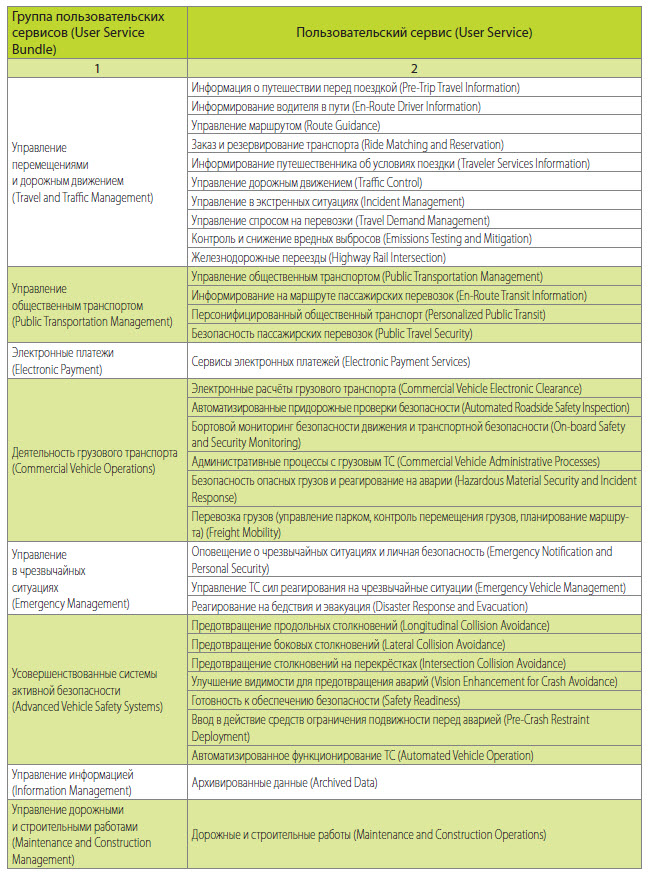
Так, Национальная архитектура ИТС США ориентирована на реализацию 33 пользовательских сервисов ИТС, которые разделены на 8 групп [12]. Их перечень приведён в таблице 2. Сервис «Безопасность опасных грузов и реагирование на аварии» (Hazardous Material Security and Incident Response) относится к группе «Деятельность грузового транспорта» (Commercial Vehicle Operations).
Функциональная архитектура указанного сервиса предусматривает контроль перевозок опасных грузов, в том числе их отслеживание и классификацию, уведомление об аварии с опасными грузами, передачу информации об авариях и нарушениях порядка перевозки опасных грузов всем заинтересованным организациям, отслеживание местоположения транспортного средства, перевозящего опасный груз, обнаружение его отклонения от запланированного маршрута, идентификацию входа ТС в чувствительные географические области (например зоны, в которых перевозка опасных грузов запрещена), аутентификация водителя с деактивацией транспортного средства при попытке управления ТС неправомочным водителем [13].
В Европе проводятся работы под эгидой Европейского агентства по ГНСС (European GNSS Agency – GSA) в соответствии с Планом действий по приложениям ГНСС [14] и Планом действий по логистике грузового транспорта [15]. В этом контексте выполняется проект SCUTUM (SeCUring the EU GNSS adopTion in the dangeroUs Material transport – Применение ГНСС ЕС для обеспечения безопасности при транспортировке опасных грузов).
Система обеспечивает мониторинг координат ТС, перевозящих ОГ, а также параметров состояния ТС и груза. Координаты определяются с помощью системы EGNOS (англ. European Geostationary Navigation Overlay Service – европейская геостационарная служба навигационного покрытия). EGNOS находится в эксплуатации с октября 2009 г. и предназначена для улучшения работы системы GPS и, в перспективе, Galileo на территории Европы, являясь аналогом американской системы WAAS. Зона действия EGNOS охватывает всю Европу, север Африки и небольшую часть европейской России. Система состоит из сети наземных станций, главной станции, которая аккумулирует информацию от спутников GPS, Galileo и геостационарных спутников EGNOS, через которые эта информация транслируется на GPS-приёмники, поддерживающие приём дифференциальных поправок.
Бортовое оборудование системы SCUTUM установлено на 300 ТС итальянской нефтяной компании Eni, перевозящих нефтепродукты . Бортовое оборудование передаёт данные о координатах и состоянии ТС и ОГ в центр реагирования на чрезвычайные ситуации по каналам сотовой связи с помощью сервиса GPRS (англ. General Packet Radio Service – пакетная радиосвязь общего пользования).
В настоящее время компания Eni планирует полностью оснастить указанными средствами свой парк (около 1500 транспортных средств). Начинается внедрение системы во Франции и Австрии, а в дальнейшем оно ожидается и в других странах ЕС.
В России система мониторинга включает:
- бортовые устройства, обеспечивающие навигацию ТС с помощью ГНСС, связь с автоматизированными центрами контроля и надзора (АЦКН) Ространснадзора по каналам сотовой и, возможно, спутниковой связи (с низкоорбитальными спутниками) и передачу в АЦКН информации о местоположении и состоянии ТС, вводимой водителем и формируемой автоматически;
- автоматизированные центры контроля и надзора, осуществляющие мониторинг перевозок опасных грузов.
Включение в состав бортового устройства средств спутниковой связи необходимо для обеспечения мониторинга в зонах, где отсутствует сотовая связь.
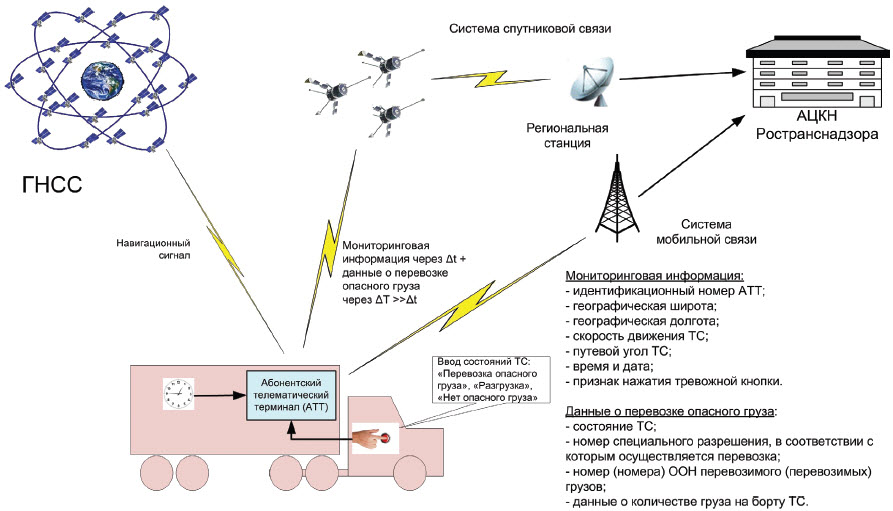
Сообщение с бортового устройства о перевозке опасного груза должно включать следующий набор мониторинговой информации:
- идентификационный номер бортового устройства;
- географическую широту местоположения транспортного средства;
- географическую долготу местоположения транспортного средства;
- скорость движения транспортного средства;
- путевой угол транспортного средства;
- время и дату фиксации местоположения транспортного средства;
- признак нажатия тревожной кнопки.
Кроме того, необходимо обеспечить возможность передачи следующих данных о перевозке опасных грузов:
- состояние ТС («Перевозка опасного груза», «Разгрузка», «Нет опасного груза»);
- номер специального разрешения, в соответствии с которым осуществляется перевозка;
- номер (номера) ООН перевозимого (перевозимых) грузов;
- данные о количестве груза на борту ТС.
Получив указанную информацию (рис. 6), контролирующие органы имеют возможность определить государственный регистрационный номер, модель, марку и принадлежность ТС, вид перевозимого груза (грузов), разрешённый маршрут движения. При этом возможен контроль наличия специального разрешения для данного ТС, вида груза и маршрута. В ходе перевозки они получают мониторинговую информацию, которая может использоваться для автоматического контроля соблюдения разрешённого маршрута перевозки, а при отклонении от него на величину, большую заданной, – для выдачи тревожного сообщения оператору и на линейные посты транспортного надзора и дорожной полиции.
Перевозки опасных грузов могут производиться в упаковке, в цистернах и навалом/насыпью. Определение количества груза на борту ТС целесообразно осуществлять следующим образом.
Для опасных грузов в упаковках целесообразно предусмотреть нанесение на каждую упаковку RFID-меток, содержащих признак опасного груза и его номер ООН. Для сбора информации с RFID-меток ТС должно быть оснащено считывателями, зоны действия которых полностью перекрывают внутренний объём кузова ТС (рис. 7). Если конструкция кузова предусматривает возможность его закрытия и запирания, на запорное устройство целесообразно поместить «электронную пломбу» – приспособление, выдающее сигнал при попытке его несанкционированного вскрытия.

При перевозках опасных грузов навалом/насыпью представляется целесообразным использовать датчики нагрузки на оси. Существуют разновидности датчиков для автомобилей с рессорной подвеской и с пневмоподвеской. В первом случае датчик монтируется между грузовой платформой (или рамой) и подрессоренной осью с помощью системы рычагов, во втором – включается в любое место пневмосистемы и реагирует на изменение давления в ней.
В случае, когда датчики нагрузки на ось не учитывают отклонения поверхности, на которой находится ТС, от горизонтального положения, доля веса ТС Pi, приходящаяся на контролируемое датчиком колесо, определяется следующим образом
Для измерения указанных углов ТС должно быть оснащено соответствующими датчиками.
Как видно из вышеприведенной статистики ДТП с ТС, перевозящими опасные грузы, подавляющее большинство таких ДТП происходит с цистернами. Подобные ДТП часто влекут за собой тяжёлые последствия в виде как гибели или тяжкого ущерба здоровью людей, так и значительного материального ущерба вследствие разлива перевозимых жидкостей, их возгорания, заражения местности отравляющими веществами.
В этой связи представляется целесообразным принятие широкого круга мер по контролю за перевозками опасных грузов в цистернах, тем более что реализация таких мер является относительно несложной.
Масса перевозимого газа может контролироваться с помощью датчиков давления и температуры с использованием уравнения Менделеева-Клапейрона, которое можно записать в следующем виде
Виталий Комаров, первый заместитель генерального директора ОАО «НИИАТ» по научной работе, к.т.н.
Сергей Гараган, главный научный сотрудник ОАО «НИИАТ», д.т.н.
ОБСУДИТЬ НА ФОРУМЕ>>>
Статья опубликована в сокращённом виде. Полный вариант можно прочитать в журнале "Вестник ГЛОНАСС" №2(18) за Июнь месяц 2014 года
Перепечатка в полном или частичном виде возможна с обязательной активной ссылкой на источник vestnik-glonass.ru
В рамках Европейского союза создаётся система eCall , ориентированная на автотранспортные средства и предполагающая использование европейской спутниковой навигационной системы Galileo. В России разрабатывается система «ЭРА ГЛОНАСС» аналогичного назначения.
В рамках этих проектов проведён большой объём работ по анализу возможностей использования различных средств связи, разработке протоколов взаимодействия, архитектуры систем и т.д. Однако пока не выработаны подходы к решению некоторых ключевых задач, в значительной степени определяющих эффективность указанных систем. К таким задачам относится определение перечня аварийных ситуаций, на которые должно обеспечиваться экстренное реагирование в автоматическом режиме, а также категорий транспортных средств (ТС), подлежащих оснащению соответствующей аппаратурой.
В европейском стандарте, устанавливающем требования к функционированию европейской системы eCall [3], содержится следующее требование: «Система должна обеспечивать реакцию на столь много различных видов аварий, насколько это возможно».
Перечень таких видов аварий и рекомендации по автоматической идентификации фактов аварий ТС различных категорий были предложены в работах [4–6] и приведены в табл. 1.
Таблица 1. Рекомендации по видам аварий ТС, подлежащим автоматической идентификации.
Как видно из таблицы, к ТС, перевозящим опасные грузы (ОГ), должен предъявляться наиболее полный набор требований по автоматическому определению факта аварии, что обусловлено следующими факторами:
1. Последствия аварий при перевозках опасных грузов отличаются, как правило, высокой тяжестью, во многом связанной со свойствами указанных грузов.
2. Последствия аварий при перевозках опасных грузов могут оказывать вредное воздействие не только на непосредственных участников происшествий, но и на людей, ТС и объекты, находящиеся вблизи места аварии.
3. Авария может произойти не одномоментно, а развиваться в течение относительно продолжительного времени и на относительно протяжённом участке местности, например при утечке опасной жидкости, газа или рассыпании опасного твёрдого вещества.
Анализ данных МВД России за 2005–2007 гг. о дорожно-транспортных происшествиях (ДТП), в результате которых погибли или получили ранения люди, с участием транспортных средств, перевозивших опасные грузы [7], показывает следующее.
В 2005–2007 годах в МВД России поступила информация о 219 дорожно-транспортных происшествиях с участием транспортных средств, перевозивших опасные грузы. В результате этих происшествий погибли 82 и получили ранения 159 человек, утрачено более 900 т. опасных грузов.
Тяжесть последствий происшествий при перевозках опасных грузов составила 34 погибших на 100 пострадавших, что более чем в три раза выше, чем в дорожно-транспортных происшествиях, не связанных с такими перевозками.
Основную часть опасных грузов, находившихся на транспортных средствах при происшествиях, составляли легковоспламеняющиеся вещества (дизельное топливо, бензин, нефть, пропан, метанол, изопропанол, этилацетат, газовый конденсат).
Доля ДТП при перевозке опасных грузов в цистернах составила 97,3% (рис. 1).
Доля ДТП при перевозке в цистернах нефти и нефтепродуктов (дизельное топливо, бензин, керосин) составила 88,1% (рис. 2).
На рис. 3 приведено распределение ДТП по видам происшествий.
Рисунок 3. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по видам происшествий.
Как видно из представленных данных, наибольшую долю ДТП (44,3%) составляет опрокидывание ТС, несколько меньшую (40,6%) – столкновение ТС. Остальные виды ДТП в сумме составляют около 15%.
Как отмечается в [7], все опрокидывания (за исключением одного) произошли с транспортными средствами – цистернами (одиночное механическое транспортное средство или прицеп (полуприцеп) – цистерна в составе автопоезда), т.е. доля цистерн в количестве ТС, с которыми произошло опрокидывание, составила около 99%. При этом 84 происшествия (86%) связаны с несоблюдением водителями этих транспортных средств требований безопасности дорожного движения, 10 (10%) – с технической неисправностью транспортных средств. Каждое третье (29 из 84) опрокидывание произошло на криволинейных участках автодорог. В 85 из 97 опрокидываний (87%) происходила полная или частичная утрата опасных грузов. Всего при опрокидываниях было утрачено около 620 т. таких грузов, в среднем 7,3 т. на одно ДТП с утратой опасных грузов. В результате 12 опрокидываний (12%) происходило их возгорание.
Из общего количества столкновений 29 (33%) – явились следствием несоблюдения водителями транспортных средств с опасными грузами требований безопасности дорожного движения, 60 (67%) – водителями иных транспортных средств. В 31 из 89 столкновений (35%) происходила полная или частичная утрата опасных грузов. Всего при столкновениях было утрачено более 193 т. таких грузов, в среднем 6,2 т. на одно ДТП с утратой опасных грузов. В результате 6 столкновений (7%) происходило их возгорание.
Происшествия по местам совершения (рис. 4):
• вне населенных пунктов – 187 происшествий (85%);
• в населенных пунктах – 32 происшествия (15%).
Рисунок 4. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по местам совершения.
Происшествия по времени суток:
• дневное время (с 6 до 22 ч) – 189 происшествий (86%);
• ночное время (с 22 до 6 ч) – 30 происшествий (14%).
Рисунок 5. Распределение ДТП с участием транспортных средств, перевозивших опасные грузы, по времени суток.
Водители транспортных средств с опасными грузами, участвовавшие в происшествиях, как правило, имели свидетельства о прохождении соответствующей специальной подготовки. Исключение из этого положения составили 5 происшествий, в результате которых утрачено 54,1 т. опасных грузов.
Средний стаж работы водителей транспортных средств с опасными грузами, участвовавших в происшествиях, составил 17 лет.
Грубые нарушения режима труда и отдыха установлены в 8 происшествиях, когда водители без отдыха управляли транспортными средствами от 10 до 22 часов. В других происшествиях среднее время нахождения водителя за рулём составило около 3 часов.
Анализ вышеприведенных данных позволяет сделать следующие выводы.
1. Подавляющее большинство ДТП происходит при перевозке опасных грузов в цистернах.
2. Значительное большинство ДТП происходит при перевозке нефтепродуктов.
3. Наиболее частым видом ДТП при перевозке опасных грузов является опрокидывание транспортного средства, несколько менее частым – столкновение ТС.
4. Частым явлением, сопровождающим ДТП при перевозке опасных грузов, является возгорание опасного груза.
5. Значительное большинство ДТП происходит вне населенных пунктов.
6. Результатом многих ДТП является утрата значительных количеств перевозимых грузов.
Отсюда следует целесообразность принятия специальных мер по экстренному реагированию на аварии автотранспортных средств, перевозящих опасные грузы.
В России нормативными актами предусмотрено обязательное проведение мониторинга перевозок опасных грузов, который возложен на органы Ространснадзора и местные власти. Мониторинг осуществляется с помощью комплексной информационно-аналитической системы контроля транспортных средств (КИАСК-ТС), реализованной на основе спутниковых навигационных технологий ГЛОНАСС/GPS. Это соответствует следующему требованию пункта 1.10.3.3 ДОПОГ: «Если эта мера уместна и если уже установлено необходимое оборудование, должны использоваться системы телеметрии или другие методы или устройства, позволяющие отслеживать движение грузов повышенной опасности» [8].
Указанные меры предусматриваются при разработке ИТС многих стран.
В наиболее развитых зарубежных странах развитие телематических транспортных систем (ТТС) осуществляется под руководством правительственных органов на основе централизованно разработанных архитектур, охватывающих весьма широкий круг задач, в том числе и задачи контроля перевозок опасных грузов.
Так, Национальная архитектура ИТС США ориентирована на реализацию 33 пользовательских сервисов ИТС, которые разделены на 8 групп [12]. Их перечень приведён в таблице 2. Сервис «Безопасность опасных грузов и реагирование на аварии» (Hazardous Material Security and Incident Response) относится к группе «Деятельность грузового транспорта» (Commercial Vehicle Operations).
Таблица 2. Пользовательские сервисы ИТС США.
Функциональная архитектура указанного сервиса предусматривает контроль перевозок опасных грузов, в том числе их отслеживание и классификацию, уведомление об аварии с опасными грузами, передачу информации об авариях и нарушениях порядка перевозки опасных грузов всем заинтересованным организациям, отслеживание местоположения транспортного средства, перевозящего опасный груз, обнаружение его отклонения от запланированного маршрута, идентификацию входа ТС в чувствительные географические области (например зоны, в которых перевозка опасных грузов запрещена), аутентификация водителя с деактивацией транспортного средства при попытке управления ТС неправомочным водителем [13].
В Европе проводятся работы под эгидой Европейского агентства по ГНСС (European GNSS Agency – GSA) в соответствии с Планом действий по приложениям ГНСС [14] и Планом действий по логистике грузового транспорта [15]. В этом контексте выполняется проект SCUTUM (SeCUring the EU GNSS adopTion in the dangeroUs Material transport – Применение ГНСС ЕС для обеспечения безопасности при транспортировке опасных грузов).
Система обеспечивает мониторинг координат ТС, перевозящих ОГ, а также параметров состояния ТС и груза. Координаты определяются с помощью системы EGNOS (англ. European Geostationary Navigation Overlay Service – европейская геостационарная служба навигационного покрытия). EGNOS находится в эксплуатации с октября 2009 г. и предназначена для улучшения работы системы GPS и, в перспективе, Galileo на территории Европы, являясь аналогом американской системы WAAS. Зона действия EGNOS охватывает всю Европу, север Африки и небольшую часть европейской России. Система состоит из сети наземных станций, главной станции, которая аккумулирует информацию от спутников GPS, Galileo и геостационарных спутников EGNOS, через которые эта информация транслируется на GPS-приёмники, поддерживающие приём дифференциальных поправок.
Бортовое оборудование системы SCUTUM установлено на 300 ТС итальянской нефтяной компании Eni, перевозящих нефтепродукты . Бортовое оборудование передаёт данные о координатах и состоянии ТС и ОГ в центр реагирования на чрезвычайные ситуации по каналам сотовой связи с помощью сервиса GPRS (англ. General Packet Radio Service – пакетная радиосвязь общего пользования).
В настоящее время компания Eni планирует полностью оснастить указанными средствами свой парк (около 1500 транспортных средств). Начинается внедрение системы во Франции и Австрии, а в дальнейшем оно ожидается и в других странах ЕС.
В России система мониторинга включает:
- бортовые устройства, обеспечивающие навигацию ТС с помощью ГНСС, связь с автоматизированными центрами контроля и надзора (АЦКН) Ространснадзора по каналам сотовой и, возможно, спутниковой связи (с низкоорбитальными спутниками) и передачу в АЦКН информации о местоположении и состоянии ТС, вводимой водителем и формируемой автоматически;
- автоматизированные центры контроля и надзора, осуществляющие мониторинг перевозок опасных грузов.
Включение в состав бортового устройства средств спутниковой связи необходимо для обеспечения мониторинга в зонах, где отсутствует сотовая связь.
Сообщение с бортового устройства о перевозке опасного груза должно включать следующий набор мониторинговой информации:
- идентификационный номер бортового устройства;
- географическую широту местоположения транспортного средства;
- географическую долготу местоположения транспортного средства;
- скорость движения транспортного средства;
- путевой угол транспортного средства;
- время и дату фиксации местоположения транспортного средства;
- признак нажатия тревожной кнопки.
Кроме того, необходимо обеспечить возможность передачи следующих данных о перевозке опасных грузов:
- состояние ТС («Перевозка опасного груза», «Разгрузка», «Нет опасного груза»);
- номер специального разрешения, в соответствии с которым осуществляется перевозка;
- номер (номера) ООН перевозимого (перевозимых) грузов;
- данные о количестве груза на борту ТС.
Получив указанную информацию (рис. 6), контролирующие органы имеют возможность определить государственный регистрационный номер, модель, марку и принадлежность ТС, вид перевозимого груза (грузов), разрешённый маршрут движения. При этом возможен контроль наличия специального разрешения для данного ТС, вида груза и маршрута. В ходе перевозки они получают мониторинговую информацию, которая может использоваться для автоматического контроля соблюдения разрешённого маршрута перевозки, а при отклонении от него на величину, большую заданной, – для выдачи тревожного сообщения оператору и на линейные посты транспортного надзора и дорожной полиции.
Рисунок 6. Схема передачи данных в процессе перевозки опасных грузов.
Перевозки опасных грузов могут производиться в упаковке, в цистернах и навалом/насыпью. Определение количества груза на борту ТС целесообразно осуществлять следующим образом.
Для опасных грузов в упаковках целесообразно предусмотреть нанесение на каждую упаковку RFID-меток, содержащих признак опасного груза и его номер ООН. Для сбора информации с RFID-меток ТС должно быть оснащено считывателями, зоны действия которых полностью перекрывают внутренний объём кузова ТС (рис. 7). Если конструкция кузова предусматривает возможность его закрытия и запирания, на запорное устройство целесообразно поместить «электронную пломбу» – приспособление, выдающее сигнал при попытке его несанкционированного вскрытия.
Рисунок 7. Вариант размещения считывателей RFID-меток и «электронной пломбы» в кузове ТС.
При перевозках опасных грузов навалом/насыпью представляется целесообразным использовать датчики нагрузки на оси. Существуют разновидности датчиков для автомобилей с рессорной подвеской и с пневмоподвеской. В первом случае датчик монтируется между грузовой платформой (или рамой) и подрессоренной осью с помощью системы рычагов, во втором – включается в любое место пневмосистемы и реагирует на изменение давления в ней.
В случае, когда датчики нагрузки на ось не учитывают отклонения поверхности, на которой находится ТС, от горизонтального положения, доля веса ТС Pi, приходящаяся на контролируемое датчиком колесо, определяется следующим образом
Для измерения указанных углов ТС должно быть оснащено соответствующими датчиками.
Как видно из вышеприведенной статистики ДТП с ТС, перевозящими опасные грузы, подавляющее большинство таких ДТП происходит с цистернами. Подобные ДТП часто влекут за собой тяжёлые последствия в виде как гибели или тяжкого ущерба здоровью людей, так и значительного материального ущерба вследствие разлива перевозимых жидкостей, их возгорания, заражения местности отравляющими веществами.
В этой связи представляется целесообразным принятие широкого круга мер по контролю за перевозками опасных грузов в цистернах, тем более что реализация таких мер является относительно несложной.
Масса перевозимого газа может контролироваться с помощью датчиков давления и температуры с использованием уравнения Менделеева-Клапейрона, которое можно записать в следующем виде
Виталий Комаров, первый заместитель генерального директора ОАО «НИИАТ» по научной работе, к.т.н.
Сергей Гараган, главный научный сотрудник ОАО «НИИАТ», д.т.н.
ОБСУДИТЬ НА ФОРУМЕ>>>
Статья опубликована в сокращённом виде. Полный вариант можно прочитать в журнале "Вестник ГЛОНАСС" №2(18) за Июнь месяц 2014 года
Перепечатка в полном или частичном виде возможна с обязательной активной ссылкой на источник vestnik-glonass.ru