Глобальная наземно-космическая информационная система ГЛОНИС: необходимость проектирования
25 Декабря 2013

Предмет статьи – комплексная стратегия построения в России интегрированной системы, объединяющей космический и наземный сегменты глобальной массовой подвижной связи. Систему ГЛОНИС образуют инновационные элементы. По мнению авторов, главным достоинством предлагаемого проекта является возможность обслуживания космического сегмента ГЛОНИС путём использования многоразовой авиационно-космической системы с горизонтальным стартом и последующей посадкой на Земле [1].
Мировые телекоммуникационные компании функционируют в условиях рыночных отношений. Космические системы связи не являются исключением, они должны выходить на рынки услуг и конкурировать с наземными системами связи. Проблема рентабельности и самоокупаемости космических систем является для космической индустрии России новой. Она возникла в последние годы. Чтобы обеспечить многофункциональной системе ГЛОНИС конкурентоспособность на рынке услуг после её создания, а это может быть осуществлено через 10-20 лет, необходим уверенный долгосрочный прогноз востребованности этой системы как минимум на 30-50 лет вперёд. Только при таких условиях можно ставить задачу создания системы ГЛОНИС как долгосрочную стратегическую, государственную или корпоративную.
Ретроспективный анализ информационных технологий позволил выявить главные тенденции развития устойчивых высокоинформативных систем на длительном прогнозируемом интервале (более 30-50 лет). Такими основополагающими технологиями являются:
• в космосе – космическое координатно-временное обеспечение (КВО), превышающее достигнутый уровень точности на 1,5-2 порядка;
• на земле – мобильные системы связи, имеющие стабильный долгосрочный прогноз развития – 2G, 3G, 4G, 5G и т.д.
Интеграция указанных наземных и космических технологий позволяет сформировать видение перспективной многофункциональной наземно-космической информационной системы навигации, связи, наблюдения и управления. Чтобы идеологическая и технологическая перспектива превратилась в реальность, необходимо многостороннее междисциплинарное поэтапное рассмотрение проблемы с активным участием потребителей, промышленности и компаний, продвигающих на рынок комплексные мультисервисные информационные услуги.
По своей масштабности рассматриваемое предложение относится к проблеме информатизации всей социальной сферы России и обслуживания мирового информационного сообщества. Говоря о проблеме информатизации социальной сферы сегодня и в ближайшие годы, что можно пролонгировать на десятилетие, номенклатура потребностей и количественные показатели можно определить с высокой достоверностью.
Практические потребности можно оценивать исходя из задач программы «Электронная Россия». Слабым местом этой программы является разнородность подсистем на всех уровнях управления – от центральных до региональных, местных и индивидуального. Существующие средства телекоммуникаций, их разнородность и многообразие оконечных устройств становятся препятствием к созданию полномасштабной, прозрачной, полностью доступной информационной системы.
Создание «Электронной России» только с наземной инфраструктурой войдёт в противоречие с обликом объекта обслуживания. Темпы, с которыми мобильные системы сотовой связи завоёвывают симпатии у потребителей, и показатели их рыночного проникновения ошеломляющи. В ближайшее десятилетие прогнозируется вытеснение средств стационарных сетей традиционной связи мобильными системами. К концу десятилетия они выйдут на уровень полного мультисервисного обслуживания, то есть главным объектом обслуживания станет мобильный объект. К 2015-2020 годам прогнозируется, что 3-4 млрд населения Земли будут с «трубкой в руке». Мобильная связь с её мультисервисностью, мультимедийностью, информативностью в силу рыночного превосходства будет вытеснять стационарные системы связи. Уже сегодня сотовые системы связи обеспечивают доступ потребителя в Интернет и информационные вычислительные системы. Интеграция связи и навигации уже породила массу вторичных применений, немыслимых и непредсказуемых заранее.
Мультисервисность – это возможность предоставлять потребителю в одном канале различный набор услуг. Это станет главным побудительным мотивом к массовому изобретению вторичных и третичных применений. И если в состав мультисервисной услуги наземной мобильной системы связи будет включён мультисервисный набор космических услуг, то перспективность ГЛОНИС, её технико-экономическая и коммерческая эффективность выведут её в разряд самоокупаемых систем с высоким уровнем возврата вложенных средств.
Через 15 лет мобильные системы связи выйдут не только на 4G, но и на 5G и массово проникнут в жизнь, число пользователей вырастет примерно до двух миллиардов. Сопряжение с ГЛОНИС мобильных систем обеспечит глобальный радиодоступ, то есть роуминг, независимый от наземных систем. Он внесёт в состав мультисервисных услуг космические технологии (время, синхронизацию по частоте и времени, навигацию, геодезию, мониторинг, наблюдение и управление). Это создаст качественно новый принцип абсолютного обслуживания всеми видами информации любого потребителя, находящегося в любой точке Земли в любое время.
К этому времени ГЛОНИС выйдет на высокий уровень рыночной эффективности, подготовленный успехами развития мобильных систем связи. Экономический риск будет минимальным при условии разработки системы ГЛОНИС совместно с производителями мобильных систем связи и компаниями, продвигающими все виды контента.
Система ГЛОНИС предназначена для объединения на системном уровне функций навигации, связи, управления, дистанционного зондирования Земли, мониторинга природной среды и деятельности человека в единой наземно-космической системе [2].
Информационное сопряжение космического сегмента системы ГЛОНИС с постоянно действующими наземными информационными системами определяет чрезвычайно высокое требование надёжного функционирования космических аппаратов при их нахождении на орбите. Это может быть достигнуто путём оптимального резервирования спутников; созданием подсистемы эксплуатации космических аппаратов на орбитах с обеспечением необходимого ремонта либо выведением космических аппаратов в стационарные условия для обслуживания и ремонта [3].
Интегрированная многофункциональная наземно-космическая система ГЛОНИС должна состоять из следующих основных элементов:
• орбитальная группировка космических аппаратов системного верхнего уровня на высоте 19 тыс. 100 км;
• орбитальная группировка целевых космических аппаратов нижнего уровня на высоте 900 км;
• комплекс наземных средств управления, съёма, обработки и доставки информации;
• подсистема обеспечения эксплуатации орбитальной группировки космических аппаратов верхнего и нижнего уровней.
Идеальный облик группировки космических аппаратов верхнего уровня составляет в пределе 60 космических аппаратов, которые распределены в 12 орбитальных плоскостях по 5 космических аппаратов в каждой (см. рис.1).
Для космического аппарата предлагается использовать платформу «Навигатор» производства НПО имени С.А. Лавочкина со следующими параметрами: максимальная масса – 1500 кг; масса платформы – 700 кг; масса полезной нагрузки – 500 кг; масса заправки – 150 кг; ориентация – трёхосная; точность стабилизации – 0,36 угл.сек./сек.; максимальная потребляемая энергия – 3500 Вт; срок активного существования – более 10 лет. Высота полёта космических аппаратов верхнего уровня – 19 тыс. 100 км, наклонение плоскости орбиты – 64,80 град.
Система эксплуатации многофункциональной эксплуатируемой наземно-космической системы ГЛОНИС имеет следующие спецификации:
• многократное использование каждого космического аппарата после плановой модернизации и техобслуживания в наземных условиях;
• периодичность съёма космического аппарата с орбиты для модернизации – 5 лет;
• система выведения и возврата космического аппарата с помощью авиационно-космической системы с горизонтальным стартом и посадкой;
• система эксплуатации авиационно-космической системы, техобслуживания и модернизации космического аппарата базируется на развитии авиационного ремонтного завода АРЗ-360 в Рязани;
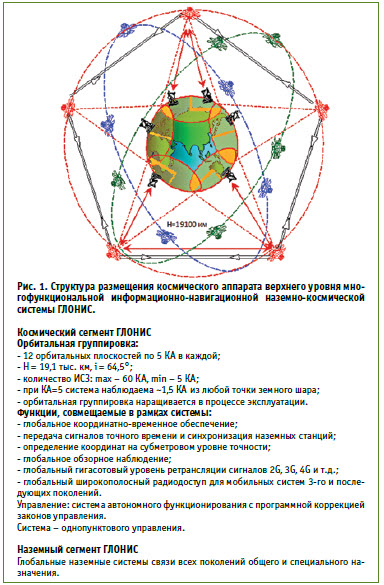
Рис. 1. Структура размещения космического аппарата верхнего уровня многофункциональной информационно-навигационной наземно-космической системы ГЛОНИС.
• взлётно-посадочные полосы «Бурана» на Байконуре, ВПП «Капустин Яр», ВПП аэродрома АРЗ-360 в Рязани, используемые для полётов авиакосмической системы;
• система выведения космического аппарата – кластерная. Одним полётом в орбитальную плоскость выводится 5 космических аппаратов с буксиром;
• замена или снятие с орбиты космического аппарата осуществляется кластерной заменой всех 5 космических аппаратов орбитальной плоскости на резервные.
Построение орбитальной плоскости предусматривает сохранение функциональной работоспособности при частичной или полной потере работоспособности одного из космических аппаратов. Пониженная работоспособность совокупности космических аппаратов в орбитальной плоскости сохраняется при выходе из строя двух космических аппаратов.
Орбитальная группировка верхнего уровня формируется путём интеграции космических информационных технологий на системном уровне. То есть путём интегрированной орбитальной группировки, создающей совокупность услуг с помощью многофункциональных космических аппаратов. Спутники оснащены средствами, позволяющими организовать общедоступные информационные поля следующего назначения: координатно-временного обеспечения; ретрансляции сигналов наземных мобильных систем связи; их синхронизации по частоте и времени; обзорного наблюдения поверхности Земли; глобального широкополосного доступа систем радиосвязи и передачи информации; а также комплекс наземных средств приёма информации.
Создание общедоступных информационных полей достигается орбитальной группировкой многофункциональных космических аппаратов, на которых размещаются технические средства для создания каждого из составляющих информационных полей. Принципиальной особенностью создания многофункциональной орбитальной группировки является то, что системообразующим в орбитальной группировке является координатно-временное обеспечение (КВО) высокой точности, так как все интегрируемые функции в космическом аппарате системного уровня требуют единого координатного и временного обеспечения.
Орбитальная группировка нижнего уровня формируется интеграцией задач на борту отдельного космического аппарата. Особенностью комплексирования задач на борту космического аппарата, несущего датчик информации основного целевого назначения, при возможности его использования для решения дополнительных задач, является полное информационное обеспечение космического аппарата от системного уровня.
Основные тактико-технические характеристики ГЛОНИС определяются имеющимися в России разработками следующего оборудования:
• бортовой водородный стандарт (БВС) разработки ОАО «Время-Ч», обеспечивающий суточную стабильность частоты ~10 в минус 14-й степени;
• сферический концентрический объектив «Астрогон-600», разработанный в ГОИ имени Вавилова и позволяющий получить разрешение изображения при обзорном наблюдении поверхности Земли и дистанционном зондировании Земли ~10-15 м и менее 1 м при многоракурсной стереопроекции соответственно;
• квантово-оптические средства связи с адаптивной оптикой, разработанные в ОАО «НПК СПП» и позволяющие получить систему глобального широкополосного информационного доступа [4];
• заатмосферный астрономический каталог, созданный в Астрономическом институте имени Штернберга МГУ и позволяющий получить возможность определения орбит многофункциональной интегрированной группировки на субдециметровом уровне;
• радиооптические шлюзы преобразования «радио-оптика» и «оптика-радио» фирмы Agilent Technologies, позволяющие сопрягать широкополосные радио- и оптические сети;
• космические ретрансляторы сигналов сотовых сетей связи, находящихся на Земле.
РЕАЛИЗУЕМОСТЬ ТЕХНОЛОГИЙ
Предлагаемый проект системы ГЛОНИС ориентирован на совокупность технологий, имеющих начальную проработку, хотя и в разной степени. Эти технологии частично прошли первые испытания в космическом полёте. В процессе системного проектирования системы ГЛОНИС необходимо параллельно с техническим проектированием конструктивных элементов системы создавать исчерпывающую теорию применения имеющегося задела технологий по целевому назначению в рамках согласованного взаимодействия интегрируемых технологий.
Важное достоинство предлагаемой концепции разработки системы ГЛОНИС заключается в одновременной выдаче заданий не только промышленности для разработки технических основ, но и заказчику системы для разработки основ теории и практики применения системы с последующим её совершенствованием и развитием на всём жизненном цикле существования. Таким образом, заказчик должен возглавлять создание, сопровождение и применение системы ГЛОНИС.
Центральным элементом системы ГЛОНИС является орбитальная группировка системного уровня, образуемая многофункциональными космическими аппаратами. Системообразующими функциональными элементами, обеспечивающими наиболее выгодное комплексирование функций, представленных на рис. 2, являются высокоточное астрозвёздное координатно-временное обеспечение и глобальная синхронизация в рамках всей орбитальной группировки.
Важным моментом предлагаемого проекта является опережающая разработка теории построения и применения подсистем ГЛОНИС. На первом этапе предлагается экспериментальная отработка в лётном эксперименте трёх спутников, запускаемых одним пуском ракеты.
Обоснуем более подробно реализуемость технологий, предлагаемых для ГЛОНИС.
БОРТОВОЙ ВОДОРОДНЫЙ ГЕНЕРАТОР БВГ РАЗРАБОТКИ ОАО «ВРЕМЯ-Ч»
Разработка БВГ была задана первоначально ННИПИ «Кварц» в рамках опытно-конструкторской работы «Метрика-КВО». В 1995 г. был выполнен эскизный проект. В настоящее время БВГ выполнен в космическом исполнении (24 кг) для космической навигационной системы ГЛОНАСС. Стабильность 10 в минус 14-й степени – 10 в минус 15-й степени, срок службы более 10 лет. Проходит типовые испытания в РИРВ перед установкой на космические аппараты «Глонасс-К».
Таким образом, основной фундаментальный элемент высокоточного космического координатно-временного обеспечения, которым является БВГ, проходит испытания. То есть имеется прямая возможность непосредственной разработки системы космической эталонной базы системы ГЛОНИС и системы автономной синхронизации.
СФЕРИЧЕСКИЙ КОНЦЕНТРИЧЕСКИЙ ОБЪЕКТИВ «АСТРОГОН-600»
Он выполнен в рамках опытно-конструкторской работы «Метрика-КВО» в 1995 году с фокусным расстоянием 600 мм и углом зрения 24 град., обеспечивающим наблюдение поверхности Земли и плюс 5000 км приземного космического пространства.
Рис. 2. Комплексирование функций на многофункциональном космическом аппарате.
Дальнейшая работа над применением объектива связана с восстановлением производства объективов такого типа в ГОИ имени Вавилова и изготовлением датчиков изображения для данного объектива.
К запуску экспериментальных объективов должно быть подготовлено программно-математическое обеспечение обработки одиночных изображений и обработки изображений стереопар на космическом аппарате.
КВАНТОВО-ОПТИЧЕСКИЕ СРЕДСТВА СВЯЗИ С АДАПТИВНОЙ ОПТИКОЙ
Работа над созданием адаптивной оптики ведётся в ОАО «Научно-производственная корпорация “Системы прецизионного приборостроения”» (ОАО «НПК “СПП”»), начиная с разработки системы оптической связи с землёй космической станции «Мир». Далее было проектирование межспутниковой линии оптической связи. Разработка завершилась в октябре 2012 г. испытанием системы передачи широкополосной информации с российского сегмента МКС на наземный пункт по лазерному каналу с объёмом 2,8 Гбайт со скоростью 125 Мбит/сек. Эксперимент подтвердил возможность внедрения в космическую технику России высокоскоростных каналов связи (до десятков гигабайт в сек.). Опыт данной разработки и испытания на МКС позволяют применить технологии широкополосной оптической связи, созданные в ОАО НПК СПП непосредственно при создании системы ГЛОНИС.
ЗААТМОСФЕРНЫЙ АСТРОНОМИЧЕСКИЙ КАТАЛОГ
После выполнения европейской программы Hipparcos в Государственном астрономическом институте им. П.К. Штернберга и Астрономической обсерваторией «Пулково» был создан электронный обзорный каталог объёмом ~1 млн. звезд с погрешностью установления координат звёзд ~(0,4-0,6) на 10 в минус третьей степени угловой секунды. В этом каталоге плотность звёзд составляет 25 звёзд на квадратный градус, что достаточно для высокоточных навигационных определений в абсолютном пространстве. В ОАО НПК СПП уже в течение нескольких лет ведётся разработка космического визира для заатмосферной навигации.
РАДИООПТИЧЕСКИЕ ШЛЮЗЫ ПРЕОБРАЗОВАНИЯ
При создании в системе ГЛОНИС широкополосного радиодоступа необходимо применять широкополосные оптические каналы. Для решения данной проблемы разработаны шлюзы для переноса информации в оптический носитель и обратно (фирма Agilent Technologies) в каналах «радио-оптика», «оптика-радио».
РЕТРАНСЛЯЦИЯ СИГНАЛОВ НАЗЕМНЫХ СОТОВЫХ СЕТЕЙ СВЯЗИ
В структуре наземной сотовой связи космические аппараты верхнего (системного) уровня будут выполнять функцию базовой станции «гигасоты» с охватом зоны ~7000 км. В этой зоне должна быть предусмотрена возможность связи наземных базовых станций с «гигасотовой», установленной на космические аппараты верхнего уровня. Для этого предполагается установка на базовых наземных станциях остронаправленных следящих антенн на основе радиолокационной техники «Фазотрон-НИИР», НИИП имени Тихомирова и Рязанского приборного завода.
При этом линия связи может строиться по принципам: «слабый борт – сильная Земля» (узконаправленный луч) и малонаправленная антенна на борту; «сильный борт – слабая Земля» с использованием антенн типа «Ван-Атта». Экспериментальная отработка этих вариантов должна производиться при лётных испытаниях экспериментальной тройки космических аппаратов.
Таким образом, многофункциональная интегрированная наземно-космическая система ГЛОНИС опирается на основные российские технологии, разработанные за последние десятилетия.
Квантово-оптические средства наблюдения и измерения навигационных параметров, созданные в России, позволяют полностью перейти на оптические системы управления в приземных системах фундаментального космического координатно-временного обеспечения. Платформы и системы фундаментального координатно-временного обеспечения с автоматизированными системами управления, построенными на квантово-оптических средствах, становятся прецизионными носителями средств наблюдения, дистанционного зондирования Земли, РЛС, информационного обеспечения и массовой связи в программах социально-экономического развития России.
Оценим темпы развития информационных систем при помощи ретроспективного анализа.
Сегодня реализуются следующие технические решения:
• закладываются теоретические основы интеграции информационных технологий между различными сетями связи и видами информации, которые в последующем приведут к созданию мультисервисных и мультимедийных систем;
• разрабатываются системы построения асинхронных сетей передачи данных АТМ и IP-основы Интернета.
За прошедшие 30 лет в оптических информационных технологиях в России сделаны открытия и осуществлены разработки, кардинально повлиявшие на стратегию развития информационных систем:
• создана заатмосферная астрономическая система отсчёта на основе данных проекта Hipparcos (Астрономическая обсерватория «Пулково», Астрономический институт имени Штернберга). Она превышает по точности примерно на 4 порядка наземные построения и позволяет разработать облик системы обеспечения космической навигации, на 2-3 порядка по точности превышающей наземные методы наблюдения. Кроме того, появляется возможность разработать идеологию инструмента для уточнения собственных движений звёзд в заатмосферной системе отсчёта;
• созданы квантово-оптические измерительные и информационные системы (разработка ОАО «НПК «СПП»), позволившие выйти на уровень субмиллиметровых точностей измерения – наземная оптико-лазерная система; телескоп траекторных измерений Алтайского оптико-лазерного центра;
• созданы квантово-оптические средства межспутниковой связи, обеспечивающие синхронизацию элементов космической эталонной базы и гига- и терабитные скорости передачи информации по межспутниковым каналам связи [4];
• в Оптическом институте имени Вавилова созданы оптические концентрические широкоугольные объективы высокого разрешения для глобального оперативного наблюдения, дистанционного зондирования Земли, позволяющие осуществлять многоспутниковое многоракурсное фотографирование поверхности на уровне голографического разрешения (см. рис.3);
• созданы средства для квантово-оптической связи «космос-Земля» – широкополосного канала связи через спутниковую систему (ОАО «НПК «СПП»);
• создана Российская сеть лазерных станций;
• созданы глобальные оптоволоконные системы связи, создающие наземный фундамент для создания больших наземно-космических интегрированных информационных суперсистем (ОАО «Транстелеком»);
• создана космическая платформа «Навигатор» (НПО имени С.А. Лавочкина), наилучшим образом обеспечивающая условия интеграции на системном уровне глобальной наземно-космической информационной системы.
На рис. 4 представлен вид базовой платформы систем фундаментального космического координатно-временного обеспечения в качестве носителей средств и систем целевого назначения на основе платформы «Навигатор» НПО имени Лавочкина, где КОС – квантово-оптическая система.
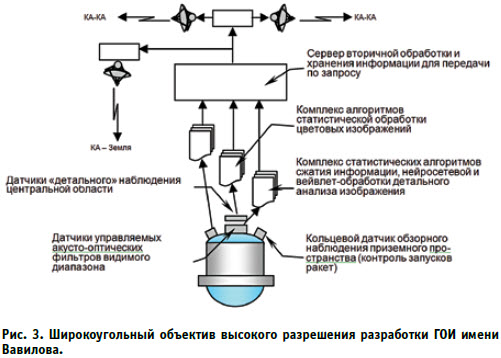
Рис. 3. Широкоугольный объектив высокого разрешения разработки ГОИ имени Вавилова.
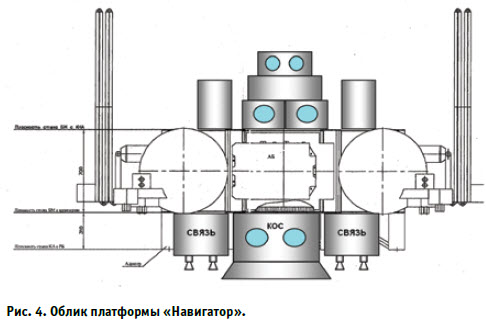
Рис. 4. Облик платформы «Навигатор».
Задачи, решаемые базовой платформой фундаментального космического координатно-временного обеспечения:
• космическая навигация с помощью спутников и космических систем реализуется в заатмосферном звёздном базисе и обеспечивает уровень точности, превышающий на 2-3 порядка достигнутый с Земли радиосредствами дальномерно-угломерных измерений на основе оптических технологий;
• обеспечение недостижимой при наблюдениях с Земли непрерывности процесса уточнения собственных движений звёзд в высокоточном заатмосферном звёздном базисе;
• высокоточная синхронизация космической эталонной базы, реализуемая при использовании межспутниковых лазерных измерительных линий связи;
• многоспутниковые стереопроекции на уровне оптического голографического разрешения;
• глобальный широкополосный доступ в оптическом диапазоне;
• квантово-оптический канал «космос-Земля» («Земля-космос») соединяет наземные и космические информационные потоки.
Эти способы и квантово-оптические средства создают космический, не зависящий от Земли и наземных средств, высокоточный координатно-временной базис независимого, то есть автономного, функционирования космической части системы ГЛОНИС, информационно сопряжённой с наземными средствами.
Космические аппараты, оснащённые перечисленными оптическими средствами, функционально организованы в многоцелевую информационную систему, самостоятельно развёртываемую в приземном (прилунном, примарсианском) пространстве.
Изложенная концепция интеграции технологий отдаёт предпочтение оптической технологии в создании координатно-временной системы.
Постановка проблемы выведения и возврата космических аппаратов при помощи авиационно-космической системы для их обслуживания на Земле применительно к многофункциональной наземно-космической системе ГЛОНИС обусловлена следующими причинами:
• необходимость согласованного во времени функционирования космического и наземного сегментов с периодичностью модернизации примерно раз в 5 лет, что определяется циклом обновления наземных систем мобильной связи. Решить данное противоречие между тенденцией создания космических аппаратов со сроком службы в 15 лет и необходимостью модернизации спутников каждые пять лет можно только на пути решения проблемы возврата космических аппаратов с помощью авиационно-космической системы для их модернизации и ремонта;
• технико-экономически неэффективно и невозможно поддерживать систему ГЛОНИС одноразовыми космическими аппаратами из-за непомерной стоимости затрат на средства выведения и изготовление новых космических аппаратов;
• невозможность поддержания 5-летней ротации космических аппаратов при их одноразовой эксплуатации пусками ракет из-за значительных затрат на производство большого количества спутников и носителей (60 космических аппаратов в пятилетие);
• невозможность накопления опыта эксплуатации в космосе (при невозвращаемых космических аппаратах) и совершенствования их конструкции и используемых материалов;
• реализация системы возвращения для обслуживания в наземных условиях более чем на порядок снижает расходы на поддержание системы ГЛОНИС, в сравнении с однократным использованием космических аппаратов.
Указанные причины, показывающие необходимость перехода к обслуживаемым космическим системам, совпадают с тенденциями развития облика авиационно-космических аппаратов.
ОСНОВНЫЕ ПОЛОЖЕНИЯ КОНЦЕПЦИИ МНОГОРАЗОВОЙ АВИАЦИОННО-КОСМИЧЕСКОЙ СИСТЕМЫ
1. Многоразовая транспортная воздушно-космическая система с горизонтальным стартом МТВКС-У предназначается для решения следующих задач: выведение на рабочие орбиты и снятие с орбит с доставкой на Землю космических аппаратов в диапазоне высот от 200 км до 36 тыс. км; выведение на опорную орбиту Н=200 км полезных грузов массой до 40 т.
2. МТВКС-У целесообразно создавать в двух вариантах:
• в одноступенчатом варианте, когда масса полезного груза, выводимого на орбиту Н=200 км, – не менее 20 т; масса полезного груза, выводимого на орбиту Н=20000 км с возвращением на монтажную орбиту Н=600 км, – не менее 1 т;
• в двухступенчатом варианте, когда масса полезного груза, выводимого на орбиту Н=200 км, – не менее 40 т; масса полезного груза, выводимого на орбиту Н=20 тыс. км с возвращением на монтажную орбиту Н=600 км, – не менее 7,5 т (5 космических аппаратов по 1,5 т); масса полезного груза, выводимого на орбиту Н=36 тыс. км с возвращением на монтажную орбиту Н=600 км, – не менее 2,5 т.
3. МТВКС-У комплектуется двумя типами многоразовых межорбитальных буксиров ММБ: лёгкого класса – для пусков в одноступенчатом варианте и тяжёлого класса – для пусков в двухступенчатом варианте.
4. МТВКС-У должна обеспечивать взлёт носителя с аэродромов I класса и посадку на полосу аэродромов I и II классов.
5. Система должна базироваться на технологической инфраструктуре авиационно-ремонтного завода самолетов тяжёлого класса (360 АРЗ, Рязань).
6. Кратность использования планера МТВКА-У (срок до ремонта) должна быть не менее 300.
7. Время подготовки МТВКА-У к повторному полёту не должно превышать 10 дней.
ФУНКЦИОНИРОВАНИЕ СИСТЕМЫ ГЛОНИС
Модульный принцип построения космического аппарата следует из многофункциональной компоновки космической системы ГЛОНИС в целом. Функциональные модули на космическом аппарате несут в себе функции и аппаратуру всех основных подсистем: космического координатно-временного обеспечения, межспутниковой связи, связи «Земля – космический аппарат», наблюдения, высокоскоростных квантово-оптических коммутаций и коммуникаций.
Технологии, закладываемые в основу штатного функционирования системы ГЛОНИС, по исходному замыслу являются технологиями автономного функционирования, позволяющими выполнять целевые задачи независимо от прямого участия человека в контуре управления подсистемами и системой в целом. В системе ГЛОНИС предполагается реализация принципа автономного функционирования, с управлением по данным телеметрического контроля и вторичного измерительного контура средствами наземного контура управления (НКУ) [6].
Бортовые средства ГЛОНИС образуют шесть подсистем, являющихся контурами автономного функционирования (см. рис. 5), где ПМО – программно-математическое обеспечение, ЛКИ – лётно-конструкторские испытания, БКУ – бортовой контур управления, СТК – система теплового контроля, БИНС – бортовой источник навигационного сигнала, АФУ – антенно-фидерные устройства, ЧИ – частотная информация, ФИ – фазовая информация, БНО – баллистико-навигационное обеспечение, НВК –
Наземный вычислительный комплекс.
1. Подсистема эталонной космической базы образуется бортовыми эталонами времени орбитальной группировки на базе водородного генератора, которые в совокупности образуют бортовой групповой эталон частоты и времени. Этот эталон определяется по данным взаимных сверок и взаимной дальности, измеряемых методом встречной ретрансляции по лазерным или радиотехническим каналам «космический аппарат – космический аппарат» в диапазоне 70 ГГц. Система определения групповой шкалы и поправок к часам представляет многоконтурную динамически изменяющуюся космическую геодезическую сеть. Математически она может быть представлена как многоконтурная система автоматического регулирования.
2. Подсистема баллистико-навигационного обеспечения и эфемеридных определений, которая функционирует на основе угломерной измерительной информации о взаимном положении линий визирования «космический аппарат – космический аппарат» на фоне звёзд и дальномерной измерительной информации из контура эталонной базы.
3. Подсистема управления обменом служебной информацией от бортового контура управления каждого космического аппарата и всей совокупности орбитальной группировки с пункта управления наземного комплекса управления.
4. Подсистема управления процессами наблюдения, целевой обработки и доставки информации по заявкам потребителям.
5. Подсистема управления потоками внешней потребительской информации наземных мобильных систем 3G, 4G и других поколений открытого гражданского назначения, специнформации управления и информации для Вооружённых сил РФ.
6. Подсистема телеметрического контроля бортовых средств и съёма контрольной информации с автономных контуров управления.
Задачи бортового контура управления:
• приём от наземного комплекса управления информации для управления бортовыми автономно функционирующими подсистемами;
• передача в наземный комплекс управления контрольно-телеметрической информации о функционировании бортовых подсистем; проведение автономного тестового контроля бортовых подсистем;
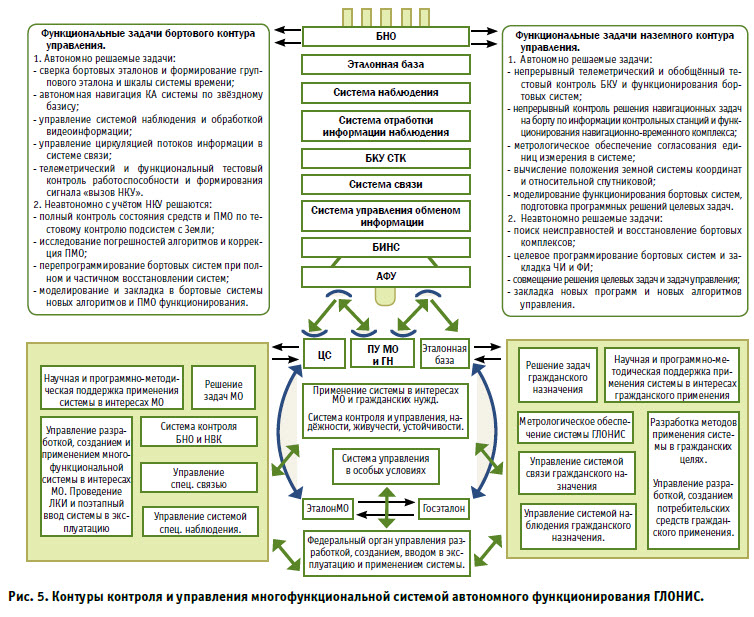
Рис. 5. Контуры контроля и управления многофункциональной системой автономного функционирования ГЛОНИС.
• проведение оперативного автоматического поиска неисправностей при отказе или выходе подсистемы за допустимые пределы тактико-технических характеристик;
• включение в процесс оценки состояния режимов поиска неисправностей и восстановления систем наземного комплекса управления и центра технической эксплуатации;
• перепрограммирование бортовых систем при отказах и закладка новых алгоритмов обработки информации.
Комплексы бортового контура управления должны быть независимыми друг от друга подсистемами, что должно исключить влияние неисправностей и сбоев на другие подсистемы контроля и управления.
Наземный контур управления образуют шесть самостоятельных подсистем.
1. Подсистема внешнего контроля функционирования эталонной базы и привязки её к госэталону. Результаты исследования поведения бортового водородного генератора БВГ в полёте, выявление физических закономерностей и ограничений, накладываемых космической средой на БВГ. Подсистема реализуется через сеть приёмных пунктов на элементах эталонной базы страны.
2. Подсистема внешнего контроля бортового контура баллистико-навигационного и эфемеридного обеспечения передаёт результаты измерений через сеть автономно функционирующих наземных контрольных станций, связанных с пунктом управления через информационные ресурсы системы. Система осуществляет программу внешнетраекторных измерений, по которым решает задачу согласования космической системы отсчёта с земной системой и вырабатывает поправочную информацию для коррекции бортовой эфемеридной информации. То есть подсистема внешнего контроля выполняет функции обратной связи для бортового контура баллистико-навигационного обеспечения.
3. Подсистема тестирования и непрерывного контроля функционирования космических телекоммуникаций.
4. Подсистема управления телекоммуникационными потоками через борт космического аппарата.
5. Подсистема, отвечающая за исследование трафиков потоков, оптимизацию информационных потоков, коррекцию бортовых алгоритмов.
6. Подсистема управления низковысотными космическими аппаратами объединённой орбитальной группировки.
Принципы управления ГЛОНИС при автономном функционировании:
1. Управление бортовыми подсистемами основывается на принципе супервизорного управления передаточными функциями подсистем. То есть параметрическим управлением бортовых алгоритмов на основе внешнего контроля наземными средствами. По такому принципу функционирует космическая эталонная база, подсистема баллистико-навигационного обеспечения, подсистема дистанционного зондирования и наблюдения из космоса.
В штатном режиме функционирование осуществляется по выходным параметрам, сопоставляемым прямо и косвенно с информацией систем внешнего контроля (режим «чёрного ящика»). При выходе за допустимые границы выходных параметров подсистема переводится в режим детального аппаратного и функционального контроля.
2. Управление функционированием телекоммуникационной подсистемы на основе непрерывного тестового контроля информационных систем, построенного по иерархической структуре поэтапного углублённого контроля, локализации отказов и активного аппаратно-программного восстановления в рамках заложенной в системе структуры ремонтопригодности. Процесс восстановления должен быть построен на принципе программных методов локализации подсистем с восстановлением (коммутацией или перезагрузкой) неисправных элементов «на ходу», без выведения системы из штатного режима эксплуатации.
3. Телеметрический контроль средств и подсистем космических аппаратов осуществляется адаптивной системой бортовой телеметрии, доставляющей обобщённую информацию – в пункт управления и детальную – в центр технологического контроля для перевода объекта в режим восстановления.
На рис. 6 представлена укрупнённая структура перспективной наземно-космической системы ГЛОНИС, где показана функциональная структура управления созданием, эксплуатацией, целевым применением ГЛОНИС, при этом учтены сформулированные выше принципы автономного функционирования двухъярусной многофункциональной космической системы.

Рис. 6. Укрупнённая структура перспективной наземно-космической системы ГЛОНИС.
УПРАВЛЕНИЕ ФУНКЦИОНИРОВАНИЕМ ОРБИТАЛЬНОЙ ГРУППИРОВКИ ИЗ ОДНОГО ЦЕНТРА
При вводе системы ГЛОНИС в штатную эксплуатацию организуется внутрисистемный информационный обмен через собственные спутниковые каналы связи. Пункты контроля и автоматической коррекции принимают информацию с борта каждого космического аппарата и ретранслируют её на пункт управления через собственные каналы связи. При такой организации системы управления, при условии совмещения канала управления с каналом связи, управление системой может организовываться из любого месторасположения пункта управления, оснащённого средствами приёма и аппаратно-программным комплексом управления.
Поэтому наряду с Главным пунктом управления системой ГЛОНИС могут применяться резервные, дублирующие, региональные пункты управления, способные решать как общую задачу управления орбитальной группировки, так и частные целевые, региональные задачи с выведением целевой информации на место (или местность) реального потребителя в реальном масштабе времени.
Для такого многоцелевого применения предусматривается «многостанционный» (многопунктовый) доступ к управлению ресурсами для решения частных задач наблюдения, координатно-временного обеспечения и управления средствами различного назначения, координируемых Главным пунктом управления.
В соответствии с возможными видами решаемых задач может быть предусмотрен унифицированный ряд стационарных и подвижных пунктов управления на различных носителях (автомобиль, вертолёт, самолёт, боевая машина пехоты, корабль и др.).
Принцип однопунктового управления, при котором в рамках Главного пункта сосредоточено управление всеми подсистемами, ресурсами, их распределением и перенацеливанием, предусматривает предоставление сегментов ресурсов и возможности управления ими в распоряжение пользователей и абонентов в рамках их прав и приоритетов. При таком распределении функций управления ресурсами системы между центральным органом управления и многопунктовым пользованием обеспечивается независимое многоцелевое применение системы при сохранении централизованного контроля за функционированием и программной поддержкой заявок на нештатное и нестандартное применение.
Штатное функционирование системы ГЛОНИС в полном объёме её возможностей образуется поэтапным вводом её подсистем. Логика построения системы такова, что ввод системы начинается с одиночного космического аппарата. По мере наращивания орбитальной группировки производится постепенное информационное включение функционирования системы по всем её подсистемам в полном объёме выполняемых задач.
Каждый космический аппарат системы ГЛОНИС по каждой его подсистеме отрабатывается пунктом управления индивидуально наземным комплексом управления. При этом последовательность «запуска» системы в эксплуатацию состоит из следующих этапов. Прежде всего, космический аппарат приводится в активное функционирование автономно и включается в эксплуатацию при частичном выполнении функций. Затем космический аппарат вводится в структуру существующей космической навигационной системы ГЛОНАСС в порядке эволюционной «замены» спутников системы ГЛОНАСС на спутники ГЛОНИС.
При включении космического аппарата он вначале выполняет функции системы ГЛОНАСС в полном объёме, так что потребитель не замечает такой замены. Затем производится групповая отработка функционирования наращиваемых частных группировок, начиная с двух-трёх космических аппаратов. Это позволяет включать полномасштабные функции всех подсистем космических аппаратов в режиме неавтономного функционирования. Дальнейшее наращивание орбитальной группировки наполняет пространственную информационную ёмкость многофункциональной космической системы полностью.
Наконец, производится введение системы ГЛОНИС в полномасштабное автономное функционирование и переход наземного комплекса управления в режим контрольных функций в соответствии с распределением задач между ним и бортовым контуром управления.
Рассмотрим подробнее технологию ввода в эксплуатацию всех космических аппаратов системы ГЛОНИС.
ТЕХНОЛОГИЯ РАБОТЫ С ОДИНОЧНЫМ КОСМИЧЕСКИМ АППАРАТОМ
После выведения космического аппарата в заданную точку производится телеметрический контроль его работоспособности. Затем космический аппарат вводится в эксплуатацию в следующей последовательности:
• организуется эфемеридно-временное обеспечение по традиционной беззапросной наземной технологии и по достижении штатного режима космического аппарата включается в рабочую орбитальную группировку системы ГЛОНАСС;
• на следующем этапе отрабатывается и начинает функционировать система связи, отрабатываются режимы регионального обмена информацией со всеми видами потребителей;
• на последнем этапе отрабатывается и вводится в режим экспериментальной отработки система наблюдения.
Таким образом, одиночный космический аппарат, вводимый на подмену спутников системы ГЛОНАСС, входит в структуру штатной эксплуатации по координатно-временному обеспечению и начинает отработку и частичную эксплуатацию информационных систем в режиме одиночного аппарата.
ТЕХНОЛОГИЯ РАБОТЫ С НЕСКОЛЬКИМИ КОСМИЧЕСКИМИ АППАРАТАМИ
Дальнейшее наращивание орбитальной группировки в одной орбитальной плоскости до двух и более космических аппаратов позволяет после приведения спутника в работоспособное состояние отрабатывать и вводить в эксплуатацию системные и сетевые функции. На первом этапе вводится в работу межспутниковый канал связи, производится сверка часов, измерение взаимных дальностей и астро-визир-наблюдение космического аппарата на фоне звёзд. Далее запускается система автономной навигации и вычисления частотно-временных поправок и вводится в штатную эксплуатацию в автономном режиме.
Вводится в эксплуатацию система связи и информационного обмена в звене двух аппаратов. Система наблюдения отрабатывается в режиме ретрансляции информации через космическую сеть связи. Работа с несколькими космическими аппаратами осуществляется полностью под управлением наземного контура управления, который одновременно отрабатывает автономные функции и переводит спутник в автономный режим.
ТЕХНОЛОГИЯ РАБОТЫ С ПОЛНОЙ ОРБИТАЛЬНОЙ ГРУППИРОВКОЙ
При заполнении первой орбитальной плоскости новыми космическими аппаратами системы ГЛОНИС приводятся в действие системные функции космической эталонной базы, глобальный информационный обмен и система наблюдения. На этом этапе система ГЛОНИС сдаётся в частичную опытную эксплуатацию всем видам пользователей.
Дальнейшее наращивание возможностей, накопление опыта решения целевых задач должно сопровождаться совершенствованием технологии функционирования бортовых систем, введением на борт космических аппаратов новых, заменяющих исходные, алгоритмов и программ обработки. Особенностью штатной эксплуатации многофункциональной системы ГЛОНИС, в отличие от предыдущих космических систем, должно стать её непрерывное совершенствование путём перепрограммирования бортовых систем и наращивания функциональных возможностей.
СТРАТЕГИЯ И ЦЕЛИ РАЗВИТИЯ ГЛОНИС
Космическая индустрия обладает большой инерционностью к восприятию и реализации новых идей. Каждый космический комплекс представляет собой комплекс взаимоувязанных и взаимообусловленных технологий и конструктивных решений, отрабатываемых на длительном временном интервале, предшествующем запуску системы в космос. Цикл разработки космической системы от замысла до запуска и принятия в эксплуатацию измеряется десятилетиями. Лидирующее положение России в космической деятельности можно сохранить при поэтапном переходе на магистральный путь многофункционального построения единой взаимоувязанной информационной орбитальной группировки Российской Федерации, то есть системы ГЛОНИС. На первом этапе целесообразно реализовать эволюционное развитие орбитальной группировки ГЛОНАСС в многофункциональную интегрированную наземно-космическую управляющую систему ГЛОНИС.
Направления развития космической деятельности, закрепляющие лидирующее положение РФ в мире, представляются следующими:
1.Сохранение и развитие космической связи как массового глобального явления только на пути конвергенции с системами мобильной связи всех поколений в рамках средневысотной сетевой интегрированной системы.
2.Технологии космического координатно-временного обеспечения, разрабатываемые в России, позволят повысить точность космической хронометрии и координатометрии на 1,5-2 порядка.
3.Интеграция технологий космического координатно-временного обеспечения на средневысотном уровне космических аппаратов и технологий мобильных систем связи всех поколений позволит России создать глобальную наземно-космическую систему, опережающую на десятилетие развитие мировых навигационно-связных систем. Это создаст глобальный радиодоступ, независимый от развития наземных систем связи.
4.Комплексная интеграция навигационно-связных прорывных технологий с информационными технологиями дистанционного зондирования Земли позволит России занять лидирующее положение в мире при своевременной конвергенции моноцелевых космических систем в единую многофункциональную группировку системы ГЛОНИС.
Разработка концепции и системного проекта единой многофункциональной наземно-космической информационной системы России ГЛОНИС, её создание и развитие на основе международного сотрудничества в 2014–2020 г.г. позволит космической индустрии России определить генеральную стратегию развития и сконцентрировать усилия на основных направлениях её развития.
ЗАМЫСЕЛ
Используя настоящий момент глобального взрывного революционного развития мировых телекоммуникационных и информационных технологий, а также возможность интеграции российских технологий космического координатно-временного обеспечения с мировыми достижениями мобильной связи в процессе её становления, можно вывести космическую индустрию России в следующий цикл технологического развития, опережая на десятилетия передовые страны мира.
Успехи и востребованность космической деятельности будут зависеть от роли космических средств и технологий в той или иной сфере жизни человека. Ориентация на принцип многофункционального мультисервисного обслуживания социальной деятельности России позволяет предложить системные решения по предоставлению услуг различным сферам деятельности, на основе чего должен быть разработан и представлен на государственное утверждение проект социального заказа на космическую деятельность.
Особенность предлагаемой концепции разработки ГЛОНИС заключается в одновременном задании технических условий не только промышленности для разработки технологических основ, но, в не меньшей степени, и заказчику системы ГЛОНИС на разработку системных основ теории и практики её применения с последующим совершенствованием и развитием на всём временном интервале её эксплуатации.
При таком методе проектирования ГЛОНИС заказчик должен затем возглавить создание, дальнейшее сопровождение и эксплуатацию космической системы.
Центральным элементом создания перспективной интегрированной многофункциональной обслуживаемой (эксплуатируемой) системы является орбитальная группировка системного уровня, образуемая многофункциональными космическими аппаратами. Системообразующим функциональным элементом, обеспечивающим наиболее выгодное комплексирование представленных функций, является высокоточное астрозвёздное координатно-временное обеспечение и глобальная частотно-временная синхронизация в рамках всей орбитальной группировки [5].
Сформулированные выше принципы построения эксплуатации обслуживаемой космонавтики логически выстраивают компактную систему единого наземно-космического комплекса и могут базироваться на развитии авиационно-космической системы на базе авиационно-ремонтного завода АРЗ-360 (Рязань).
Особенностью предлагаемого проекта является опережающая разработка теории построения и применения подсистем ГЛОНИС в рамках поэтапной экспериментальной отработки в наземном и лётном эксперименте. При создании ГЛОНИС необходимо опираться на вышеперечисленные российские технологии и оборудование, созданное за последние десятилетия.
ВЫВОДЫ
Создание компактного научно-промышленного центра обслуживания космической части системы ГЛОНИС будет отвечать условиям наивысшего уровня технико-экономической эффективности на государственном и национальном уровне. Управление полётом авиационно-космической системы и выполнение всех операций в космосе будет осуществляться в единой системе средств связи и управления в существующей и развиваемой структуре управления полётами космических аппаратов.
Артем Сергеевич Аджемов, д.т.н., профессор, ректор Московский технический университет связи и информатики (МТУСИ);
Сергей Львович Мишенков, д.т.н., профессор;
Николай Исаакович Смирнов, д.т.н., профессор;
Владимир Дмитриевич Кусков, к.т.н., действительный член Российской академии космонавтики им. К.Э. Циолковского (РАКЦ);
Елена Львовна Новикова, член-корреспондент РАКЦ.ЛИТЕРАТУРА:
Перепечатка в полном или частичном виде возможна с обязательной активной ссылкой на источник vestnik-glonass.ru
Мировые телекоммуникационные компании функционируют в условиях рыночных отношений. Космические системы связи не являются исключением, они должны выходить на рынки услуг и конкурировать с наземными системами связи. Проблема рентабельности и самоокупаемости космических систем является для космической индустрии России новой. Она возникла в последние годы. Чтобы обеспечить многофункциональной системе ГЛОНИС конкурентоспособность на рынке услуг после её создания, а это может быть осуществлено через 10-20 лет, необходим уверенный долгосрочный прогноз востребованности этой системы как минимум на 30-50 лет вперёд. Только при таких условиях можно ставить задачу создания системы ГЛОНИС как долгосрочную стратегическую, государственную или корпоративную.
Ретроспективный анализ информационных технологий позволил выявить главные тенденции развития устойчивых высокоинформативных систем на длительном прогнозируемом интервале (более 30-50 лет). Такими основополагающими технологиями являются:
• в космосе – космическое координатно-временное обеспечение (КВО), превышающее достигнутый уровень точности на 1,5-2 порядка;
• на земле – мобильные системы связи, имеющие стабильный долгосрочный прогноз развития – 2G, 3G, 4G, 5G и т.д.
Интеграция указанных наземных и космических технологий позволяет сформировать видение перспективной многофункциональной наземно-космической информационной системы навигации, связи, наблюдения и управления. Чтобы идеологическая и технологическая перспектива превратилась в реальность, необходимо многостороннее междисциплинарное поэтапное рассмотрение проблемы с активным участием потребителей, промышленности и компаний, продвигающих на рынок комплексные мультисервисные информационные услуги.
По своей масштабности рассматриваемое предложение относится к проблеме информатизации всей социальной сферы России и обслуживания мирового информационного сообщества. Говоря о проблеме информатизации социальной сферы сегодня и в ближайшие годы, что можно пролонгировать на десятилетие, номенклатура потребностей и количественные показатели можно определить с высокой достоверностью.
Практические потребности можно оценивать исходя из задач программы «Электронная Россия». Слабым местом этой программы является разнородность подсистем на всех уровнях управления – от центральных до региональных, местных и индивидуального. Существующие средства телекоммуникаций, их разнородность и многообразие оконечных устройств становятся препятствием к созданию полномасштабной, прозрачной, полностью доступной информационной системы.
Создание «Электронной России» только с наземной инфраструктурой войдёт в противоречие с обликом объекта обслуживания. Темпы, с которыми мобильные системы сотовой связи завоёвывают симпатии у потребителей, и показатели их рыночного проникновения ошеломляющи. В ближайшее десятилетие прогнозируется вытеснение средств стационарных сетей традиционной связи мобильными системами. К концу десятилетия они выйдут на уровень полного мультисервисного обслуживания, то есть главным объектом обслуживания станет мобильный объект. К 2015-2020 годам прогнозируется, что 3-4 млрд населения Земли будут с «трубкой в руке». Мобильная связь с её мультисервисностью, мультимедийностью, информативностью в силу рыночного превосходства будет вытеснять стационарные системы связи. Уже сегодня сотовые системы связи обеспечивают доступ потребителя в Интернет и информационные вычислительные системы. Интеграция связи и навигации уже породила массу вторичных применений, немыслимых и непредсказуемых заранее.
Мультисервисность – это возможность предоставлять потребителю в одном канале различный набор услуг. Это станет главным побудительным мотивом к массовому изобретению вторичных и третичных применений. И если в состав мультисервисной услуги наземной мобильной системы связи будет включён мультисервисный набор космических услуг, то перспективность ГЛОНИС, её технико-экономическая и коммерческая эффективность выведут её в разряд самоокупаемых систем с высоким уровнем возврата вложенных средств.
Через 15 лет мобильные системы связи выйдут не только на 4G, но и на 5G и массово проникнут в жизнь, число пользователей вырастет примерно до двух миллиардов. Сопряжение с ГЛОНИС мобильных систем обеспечит глобальный радиодоступ, то есть роуминг, независимый от наземных систем. Он внесёт в состав мультисервисных услуг космические технологии (время, синхронизацию по частоте и времени, навигацию, геодезию, мониторинг, наблюдение и управление). Это создаст качественно новый принцип абсолютного обслуживания всеми видами информации любого потребителя, находящегося в любой точке Земли в любое время.
К этому времени ГЛОНИС выйдет на высокий уровень рыночной эффективности, подготовленный успехами развития мобильных систем связи. Экономический риск будет минимальным при условии разработки системы ГЛОНИС совместно с производителями мобильных систем связи и компаниями, продвигающими все виды контента.
Система ГЛОНИС предназначена для объединения на системном уровне функций навигации, связи, управления, дистанционного зондирования Земли, мониторинга природной среды и деятельности человека в единой наземно-космической системе [2].
Информационное сопряжение космического сегмента системы ГЛОНИС с постоянно действующими наземными информационными системами определяет чрезвычайно высокое требование надёжного функционирования космических аппаратов при их нахождении на орбите. Это может быть достигнуто путём оптимального резервирования спутников; созданием подсистемы эксплуатации космических аппаратов на орбитах с обеспечением необходимого ремонта либо выведением космических аппаратов в стационарные условия для обслуживания и ремонта [3].
Интегрированная многофункциональная наземно-космическая система ГЛОНИС должна состоять из следующих основных элементов:
• орбитальная группировка космических аппаратов системного верхнего уровня на высоте 19 тыс. 100 км;
• орбитальная группировка целевых космических аппаратов нижнего уровня на высоте 900 км;
• комплекс наземных средств управления, съёма, обработки и доставки информации;
• подсистема обеспечения эксплуатации орбитальной группировки космических аппаратов верхнего и нижнего уровней.
Идеальный облик группировки космических аппаратов верхнего уровня составляет в пределе 60 космических аппаратов, которые распределены в 12 орбитальных плоскостях по 5 космических аппаратов в каждой (см. рис.1).
Для космического аппарата предлагается использовать платформу «Навигатор» производства НПО имени С.А. Лавочкина со следующими параметрами: максимальная масса – 1500 кг; масса платформы – 700 кг; масса полезной нагрузки – 500 кг; масса заправки – 150 кг; ориентация – трёхосная; точность стабилизации – 0,36 угл.сек./сек.; максимальная потребляемая энергия – 3500 Вт; срок активного существования – более 10 лет. Высота полёта космических аппаратов верхнего уровня – 19 тыс. 100 км, наклонение плоскости орбиты – 64,80 град.
Система эксплуатации многофункциональной эксплуатируемой наземно-космической системы ГЛОНИС имеет следующие спецификации:
• многократное использование каждого космического аппарата после плановой модернизации и техобслуживания в наземных условиях;
• периодичность съёма космического аппарата с орбиты для модернизации – 5 лет;
• система выведения и возврата космического аппарата с помощью авиационно-космической системы с горизонтальным стартом и посадкой;
• система эксплуатации авиационно-космической системы, техобслуживания и модернизации космического аппарата базируется на развитии авиационного ремонтного завода АРЗ-360 в Рязани;
Рис. 1. Структура размещения космического аппарата верхнего уровня многофункциональной информационно-навигационной наземно-космической системы ГЛОНИС.
• взлётно-посадочные полосы «Бурана» на Байконуре, ВПП «Капустин Яр», ВПП аэродрома АРЗ-360 в Рязани, используемые для полётов авиакосмической системы;
• система выведения космического аппарата – кластерная. Одним полётом в орбитальную плоскость выводится 5 космических аппаратов с буксиром;
• замена или снятие с орбиты космического аппарата осуществляется кластерной заменой всех 5 космических аппаратов орбитальной плоскости на резервные.
Построение орбитальной плоскости предусматривает сохранение функциональной работоспособности при частичной или полной потере работоспособности одного из космических аппаратов. Пониженная работоспособность совокупности космических аппаратов в орбитальной плоскости сохраняется при выходе из строя двух космических аппаратов.
Орбитальная группировка верхнего уровня формируется путём интеграции космических информационных технологий на системном уровне. То есть путём интегрированной орбитальной группировки, создающей совокупность услуг с помощью многофункциональных космических аппаратов. Спутники оснащены средствами, позволяющими организовать общедоступные информационные поля следующего назначения: координатно-временного обеспечения; ретрансляции сигналов наземных мобильных систем связи; их синхронизации по частоте и времени; обзорного наблюдения поверхности Земли; глобального широкополосного доступа систем радиосвязи и передачи информации; а также комплекс наземных средств приёма информации.
Создание общедоступных информационных полей достигается орбитальной группировкой многофункциональных космических аппаратов, на которых размещаются технические средства для создания каждого из составляющих информационных полей. Принципиальной особенностью создания многофункциональной орбитальной группировки является то, что системообразующим в орбитальной группировке является координатно-временное обеспечение (КВО) высокой точности, так как все интегрируемые функции в космическом аппарате системного уровня требуют единого координатного и временного обеспечения.
Орбитальная группировка нижнего уровня формируется интеграцией задач на борту отдельного космического аппарата. Особенностью комплексирования задач на борту космического аппарата, несущего датчик информации основного целевого назначения, при возможности его использования для решения дополнительных задач, является полное информационное обеспечение космического аппарата от системного уровня.
Основные тактико-технические характеристики ГЛОНИС определяются имеющимися в России разработками следующего оборудования:
• бортовой водородный стандарт (БВС) разработки ОАО «Время-Ч», обеспечивающий суточную стабильность частоты ~10 в минус 14-й степени;
• сферический концентрический объектив «Астрогон-600», разработанный в ГОИ имени Вавилова и позволяющий получить разрешение изображения при обзорном наблюдении поверхности Земли и дистанционном зондировании Земли ~10-15 м и менее 1 м при многоракурсной стереопроекции соответственно;
• квантово-оптические средства связи с адаптивной оптикой, разработанные в ОАО «НПК СПП» и позволяющие получить систему глобального широкополосного информационного доступа [4];
• заатмосферный астрономический каталог, созданный в Астрономическом институте имени Штернберга МГУ и позволяющий получить возможность определения орбит многофункциональной интегрированной группировки на субдециметровом уровне;
• радиооптические шлюзы преобразования «радио-оптика» и «оптика-радио» фирмы Agilent Technologies, позволяющие сопрягать широкополосные радио- и оптические сети;
• космические ретрансляторы сигналов сотовых сетей связи, находящихся на Земле.
РЕАЛИЗУЕМОСТЬ ТЕХНОЛОГИЙ
Предлагаемый проект системы ГЛОНИС ориентирован на совокупность технологий, имеющих начальную проработку, хотя и в разной степени. Эти технологии частично прошли первые испытания в космическом полёте. В процессе системного проектирования системы ГЛОНИС необходимо параллельно с техническим проектированием конструктивных элементов системы создавать исчерпывающую теорию применения имеющегося задела технологий по целевому назначению в рамках согласованного взаимодействия интегрируемых технологий.
Важное достоинство предлагаемой концепции разработки системы ГЛОНИС заключается в одновременной выдаче заданий не только промышленности для разработки технических основ, но и заказчику системы для разработки основ теории и практики применения системы с последующим её совершенствованием и развитием на всём жизненном цикле существования. Таким образом, заказчик должен возглавлять создание, сопровождение и применение системы ГЛОНИС.
Центральным элементом системы ГЛОНИС является орбитальная группировка системного уровня, образуемая многофункциональными космическими аппаратами. Системообразующими функциональными элементами, обеспечивающими наиболее выгодное комплексирование функций, представленных на рис. 2, являются высокоточное астрозвёздное координатно-временное обеспечение и глобальная синхронизация в рамках всей орбитальной группировки.
Важным моментом предлагаемого проекта является опережающая разработка теории построения и применения подсистем ГЛОНИС. На первом этапе предлагается экспериментальная отработка в лётном эксперименте трёх спутников, запускаемых одним пуском ракеты.
Обоснуем более подробно реализуемость технологий, предлагаемых для ГЛОНИС.
БОРТОВОЙ ВОДОРОДНЫЙ ГЕНЕРАТОР БВГ РАЗРАБОТКИ ОАО «ВРЕМЯ-Ч»
Разработка БВГ была задана первоначально ННИПИ «Кварц» в рамках опытно-конструкторской работы «Метрика-КВО». В 1995 г. был выполнен эскизный проект. В настоящее время БВГ выполнен в космическом исполнении (24 кг) для космической навигационной системы ГЛОНАСС. Стабильность 10 в минус 14-й степени – 10 в минус 15-й степени, срок службы более 10 лет. Проходит типовые испытания в РИРВ перед установкой на космические аппараты «Глонасс-К».
Таким образом, основной фундаментальный элемент высокоточного космического координатно-временного обеспечения, которым является БВГ, проходит испытания. То есть имеется прямая возможность непосредственной разработки системы космической эталонной базы системы ГЛОНИС и системы автономной синхронизации.
СФЕРИЧЕСКИЙ КОНЦЕНТРИЧЕСКИЙ ОБЪЕКТИВ «АСТРОГОН-600»
Он выполнен в рамках опытно-конструкторской работы «Метрика-КВО» в 1995 году с фокусным расстоянием 600 мм и углом зрения 24 град., обеспечивающим наблюдение поверхности Земли и плюс 5000 км приземного космического пространства.
Рис. 2. Комплексирование функций на многофункциональном космическом аппарате.
Дальнейшая работа над применением объектива связана с восстановлением производства объективов такого типа в ГОИ имени Вавилова и изготовлением датчиков изображения для данного объектива.
К запуску экспериментальных объективов должно быть подготовлено программно-математическое обеспечение обработки одиночных изображений и обработки изображений стереопар на космическом аппарате.
КВАНТОВО-ОПТИЧЕСКИЕ СРЕДСТВА СВЯЗИ С АДАПТИВНОЙ ОПТИКОЙ
Работа над созданием адаптивной оптики ведётся в ОАО «Научно-производственная корпорация “Системы прецизионного приборостроения”» (ОАО «НПК “СПП”»), начиная с разработки системы оптической связи с землёй космической станции «Мир». Далее было проектирование межспутниковой линии оптической связи. Разработка завершилась в октябре 2012 г. испытанием системы передачи широкополосной информации с российского сегмента МКС на наземный пункт по лазерному каналу с объёмом 2,8 Гбайт со скоростью 125 Мбит/сек. Эксперимент подтвердил возможность внедрения в космическую технику России высокоскоростных каналов связи (до десятков гигабайт в сек.). Опыт данной разработки и испытания на МКС позволяют применить технологии широкополосной оптической связи, созданные в ОАО НПК СПП непосредственно при создании системы ГЛОНИС.
ЗААТМОСФЕРНЫЙ АСТРОНОМИЧЕСКИЙ КАТАЛОГ
После выполнения европейской программы Hipparcos в Государственном астрономическом институте им. П.К. Штернберга и Астрономической обсерваторией «Пулково» был создан электронный обзорный каталог объёмом ~1 млн. звезд с погрешностью установления координат звёзд ~(0,4-0,6) на 10 в минус третьей степени угловой секунды. В этом каталоге плотность звёзд составляет 25 звёзд на квадратный градус, что достаточно для высокоточных навигационных определений в абсолютном пространстве. В ОАО НПК СПП уже в течение нескольких лет ведётся разработка космического визира для заатмосферной навигации.
РАДИООПТИЧЕСКИЕ ШЛЮЗЫ ПРЕОБРАЗОВАНИЯ
При создании в системе ГЛОНИС широкополосного радиодоступа необходимо применять широкополосные оптические каналы. Для решения данной проблемы разработаны шлюзы для переноса информации в оптический носитель и обратно (фирма Agilent Technologies) в каналах «радио-оптика», «оптика-радио».
РЕТРАНСЛЯЦИЯ СИГНАЛОВ НАЗЕМНЫХ СОТОВЫХ СЕТЕЙ СВЯЗИ
В структуре наземной сотовой связи космические аппараты верхнего (системного) уровня будут выполнять функцию базовой станции «гигасоты» с охватом зоны ~7000 км. В этой зоне должна быть предусмотрена возможность связи наземных базовых станций с «гигасотовой», установленной на космические аппараты верхнего уровня. Для этого предполагается установка на базовых наземных станциях остронаправленных следящих антенн на основе радиолокационной техники «Фазотрон-НИИР», НИИП имени Тихомирова и Рязанского приборного завода.
При этом линия связи может строиться по принципам: «слабый борт – сильная Земля» (узконаправленный луч) и малонаправленная антенна на борту; «сильный борт – слабая Земля» с использованием антенн типа «Ван-Атта». Экспериментальная отработка этих вариантов должна производиться при лётных испытаниях экспериментальной тройки космических аппаратов.
Таким образом, многофункциональная интегрированная наземно-космическая система ГЛОНИС опирается на основные российские технологии, разработанные за последние десятилетия.
Квантово-оптические средства наблюдения и измерения навигационных параметров, созданные в России, позволяют полностью перейти на оптические системы управления в приземных системах фундаментального космического координатно-временного обеспечения. Платформы и системы фундаментального координатно-временного обеспечения с автоматизированными системами управления, построенными на квантово-оптических средствах, становятся прецизионными носителями средств наблюдения, дистанционного зондирования Земли, РЛС, информационного обеспечения и массовой связи в программах социально-экономического развития России.
Оценим темпы развития информационных систем при помощи ретроспективного анализа.
Сегодня реализуются следующие технические решения:
• закладываются теоретические основы интеграции информационных технологий между различными сетями связи и видами информации, которые в последующем приведут к созданию мультисервисных и мультимедийных систем;
• разрабатываются системы построения асинхронных сетей передачи данных АТМ и IP-основы Интернета.
За прошедшие 30 лет в оптических информационных технологиях в России сделаны открытия и осуществлены разработки, кардинально повлиявшие на стратегию развития информационных систем:
• создана заатмосферная астрономическая система отсчёта на основе данных проекта Hipparcos (Астрономическая обсерватория «Пулково», Астрономический институт имени Штернберга). Она превышает по точности примерно на 4 порядка наземные построения и позволяет разработать облик системы обеспечения космической навигации, на 2-3 порядка по точности превышающей наземные методы наблюдения. Кроме того, появляется возможность разработать идеологию инструмента для уточнения собственных движений звёзд в заатмосферной системе отсчёта;
• созданы квантово-оптические измерительные и информационные системы (разработка ОАО «НПК «СПП»), позволившие выйти на уровень субмиллиметровых точностей измерения – наземная оптико-лазерная система; телескоп траекторных измерений Алтайского оптико-лазерного центра;
• созданы квантово-оптические средства межспутниковой связи, обеспечивающие синхронизацию элементов космической эталонной базы и гига- и терабитные скорости передачи информации по межспутниковым каналам связи [4];
• в Оптическом институте имени Вавилова созданы оптические концентрические широкоугольные объективы высокого разрешения для глобального оперативного наблюдения, дистанционного зондирования Земли, позволяющие осуществлять многоспутниковое многоракурсное фотографирование поверхности на уровне голографического разрешения (см. рис.3);
• созданы средства для квантово-оптической связи «космос-Земля» – широкополосного канала связи через спутниковую систему (ОАО «НПК «СПП»);
• создана Российская сеть лазерных станций;
• созданы глобальные оптоволоконные системы связи, создающие наземный фундамент для создания больших наземно-космических интегрированных информационных суперсистем (ОАО «Транстелеком»);
• создана космическая платформа «Навигатор» (НПО имени С.А. Лавочкина), наилучшим образом обеспечивающая условия интеграции на системном уровне глобальной наземно-космической информационной системы.
На рис. 4 представлен вид базовой платформы систем фундаментального космического координатно-временного обеспечения в качестве носителей средств и систем целевого назначения на основе платформы «Навигатор» НПО имени Лавочкина, где КОС – квантово-оптическая система.
Рис. 3. Широкоугольный объектив высокого разрешения разработки ГОИ имени Вавилова.
Рис. 4. Облик платформы «Навигатор».
Задачи, решаемые базовой платформой фундаментального космического координатно-временного обеспечения:
• космическая навигация с помощью спутников и космических систем реализуется в заатмосферном звёздном базисе и обеспечивает уровень точности, превышающий на 2-3 порядка достигнутый с Земли радиосредствами дальномерно-угломерных измерений на основе оптических технологий;
• обеспечение недостижимой при наблюдениях с Земли непрерывности процесса уточнения собственных движений звёзд в высокоточном заатмосферном звёздном базисе;
• высокоточная синхронизация космической эталонной базы, реализуемая при использовании межспутниковых лазерных измерительных линий связи;
• многоспутниковые стереопроекции на уровне оптического голографического разрешения;
• глобальный широкополосный доступ в оптическом диапазоне;
• квантово-оптический канал «космос-Земля» («Земля-космос») соединяет наземные и космические информационные потоки.
Эти способы и квантово-оптические средства создают космический, не зависящий от Земли и наземных средств, высокоточный координатно-временной базис независимого, то есть автономного, функционирования космической части системы ГЛОНИС, информационно сопряжённой с наземными средствами.
Космические аппараты, оснащённые перечисленными оптическими средствами, функционально организованы в многоцелевую информационную систему, самостоятельно развёртываемую в приземном (прилунном, примарсианском) пространстве.
Изложенная концепция интеграции технологий отдаёт предпочтение оптической технологии в создании координатно-временной системы.
Постановка проблемы выведения и возврата космических аппаратов при помощи авиационно-космической системы для их обслуживания на Земле применительно к многофункциональной наземно-космической системе ГЛОНИС обусловлена следующими причинами:
• необходимость согласованного во времени функционирования космического и наземного сегментов с периодичностью модернизации примерно раз в 5 лет, что определяется циклом обновления наземных систем мобильной связи. Решить данное противоречие между тенденцией создания космических аппаратов со сроком службы в 15 лет и необходимостью модернизации спутников каждые пять лет можно только на пути решения проблемы возврата космических аппаратов с помощью авиационно-космической системы для их модернизации и ремонта;
• технико-экономически неэффективно и невозможно поддерживать систему ГЛОНИС одноразовыми космическими аппаратами из-за непомерной стоимости затрат на средства выведения и изготовление новых космических аппаратов;
• невозможность поддержания 5-летней ротации космических аппаратов при их одноразовой эксплуатации пусками ракет из-за значительных затрат на производство большого количества спутников и носителей (60 космических аппаратов в пятилетие);
• невозможность накопления опыта эксплуатации в космосе (при невозвращаемых космических аппаратах) и совершенствования их конструкции и используемых материалов;
• реализация системы возвращения для обслуживания в наземных условиях более чем на порядок снижает расходы на поддержание системы ГЛОНИС, в сравнении с однократным использованием космических аппаратов.
Указанные причины, показывающие необходимость перехода к обслуживаемым космическим системам, совпадают с тенденциями развития облика авиационно-космических аппаратов.
ОСНОВНЫЕ ПОЛОЖЕНИЯ КОНЦЕПЦИИ МНОГОРАЗОВОЙ АВИАЦИОННО-КОСМИЧЕСКОЙ СИСТЕМЫ
1. Многоразовая транспортная воздушно-космическая система с горизонтальным стартом МТВКС-У предназначается для решения следующих задач: выведение на рабочие орбиты и снятие с орбит с доставкой на Землю космических аппаратов в диапазоне высот от 200 км до 36 тыс. км; выведение на опорную орбиту Н=200 км полезных грузов массой до 40 т.
2. МТВКС-У целесообразно создавать в двух вариантах:
• в одноступенчатом варианте, когда масса полезного груза, выводимого на орбиту Н=200 км, – не менее 20 т; масса полезного груза, выводимого на орбиту Н=20000 км с возвращением на монтажную орбиту Н=600 км, – не менее 1 т;
• в двухступенчатом варианте, когда масса полезного груза, выводимого на орбиту Н=200 км, – не менее 40 т; масса полезного груза, выводимого на орбиту Н=20 тыс. км с возвращением на монтажную орбиту Н=600 км, – не менее 7,5 т (5 космических аппаратов по 1,5 т); масса полезного груза, выводимого на орбиту Н=36 тыс. км с возвращением на монтажную орбиту Н=600 км, – не менее 2,5 т.
3. МТВКС-У комплектуется двумя типами многоразовых межорбитальных буксиров ММБ: лёгкого класса – для пусков в одноступенчатом варианте и тяжёлого класса – для пусков в двухступенчатом варианте.
4. МТВКС-У должна обеспечивать взлёт носителя с аэродромов I класса и посадку на полосу аэродромов I и II классов.
5. Система должна базироваться на технологической инфраструктуре авиационно-ремонтного завода самолетов тяжёлого класса (360 АРЗ, Рязань).
6. Кратность использования планера МТВКА-У (срок до ремонта) должна быть не менее 300.
7. Время подготовки МТВКА-У к повторному полёту не должно превышать 10 дней.
ФУНКЦИОНИРОВАНИЕ СИСТЕМЫ ГЛОНИС
Модульный принцип построения космического аппарата следует из многофункциональной компоновки космической системы ГЛОНИС в целом. Функциональные модули на космическом аппарате несут в себе функции и аппаратуру всех основных подсистем: космического координатно-временного обеспечения, межспутниковой связи, связи «Земля – космический аппарат», наблюдения, высокоскоростных квантово-оптических коммутаций и коммуникаций.
Технологии, закладываемые в основу штатного функционирования системы ГЛОНИС, по исходному замыслу являются технологиями автономного функционирования, позволяющими выполнять целевые задачи независимо от прямого участия человека в контуре управления подсистемами и системой в целом. В системе ГЛОНИС предполагается реализация принципа автономного функционирования, с управлением по данным телеметрического контроля и вторичного измерительного контура средствами наземного контура управления (НКУ) [6].
Бортовые средства ГЛОНИС образуют шесть подсистем, являющихся контурами автономного функционирования (см. рис. 5), где ПМО – программно-математическое обеспечение, ЛКИ – лётно-конструкторские испытания, БКУ – бортовой контур управления, СТК – система теплового контроля, БИНС – бортовой источник навигационного сигнала, АФУ – антенно-фидерные устройства, ЧИ – частотная информация, ФИ – фазовая информация, БНО – баллистико-навигационное обеспечение, НВК –
Наземный вычислительный комплекс.
1. Подсистема эталонной космической базы образуется бортовыми эталонами времени орбитальной группировки на базе водородного генератора, которые в совокупности образуют бортовой групповой эталон частоты и времени. Этот эталон определяется по данным взаимных сверок и взаимной дальности, измеряемых методом встречной ретрансляции по лазерным или радиотехническим каналам «космический аппарат – космический аппарат» в диапазоне 70 ГГц. Система определения групповой шкалы и поправок к часам представляет многоконтурную динамически изменяющуюся космическую геодезическую сеть. Математически она может быть представлена как многоконтурная система автоматического регулирования.
2. Подсистема баллистико-навигационного обеспечения и эфемеридных определений, которая функционирует на основе угломерной измерительной информации о взаимном положении линий визирования «космический аппарат – космический аппарат» на фоне звёзд и дальномерной измерительной информации из контура эталонной базы.
3. Подсистема управления обменом служебной информацией от бортового контура управления каждого космического аппарата и всей совокупности орбитальной группировки с пункта управления наземного комплекса управления.
4. Подсистема управления процессами наблюдения, целевой обработки и доставки информации по заявкам потребителям.
5. Подсистема управления потоками внешней потребительской информации наземных мобильных систем 3G, 4G и других поколений открытого гражданского назначения, специнформации управления и информации для Вооружённых сил РФ.
6. Подсистема телеметрического контроля бортовых средств и съёма контрольной информации с автономных контуров управления.
Задачи бортового контура управления:
• приём от наземного комплекса управления информации для управления бортовыми автономно функционирующими подсистемами;
• передача в наземный комплекс управления контрольно-телеметрической информации о функционировании бортовых подсистем; проведение автономного тестового контроля бортовых подсистем;
Рис. 5. Контуры контроля и управления многофункциональной системой автономного функционирования ГЛОНИС.
• проведение оперативного автоматического поиска неисправностей при отказе или выходе подсистемы за допустимые пределы тактико-технических характеристик;
• включение в процесс оценки состояния режимов поиска неисправностей и восстановления систем наземного комплекса управления и центра технической эксплуатации;
• перепрограммирование бортовых систем при отказах и закладка новых алгоритмов обработки информации.
Комплексы бортового контура управления должны быть независимыми друг от друга подсистемами, что должно исключить влияние неисправностей и сбоев на другие подсистемы контроля и управления.
Наземный контур управления образуют шесть самостоятельных подсистем.
1. Подсистема внешнего контроля функционирования эталонной базы и привязки её к госэталону. Результаты исследования поведения бортового водородного генератора БВГ в полёте, выявление физических закономерностей и ограничений, накладываемых космической средой на БВГ. Подсистема реализуется через сеть приёмных пунктов на элементах эталонной базы страны.
2. Подсистема внешнего контроля бортового контура баллистико-навигационного и эфемеридного обеспечения передаёт результаты измерений через сеть автономно функционирующих наземных контрольных станций, связанных с пунктом управления через информационные ресурсы системы. Система осуществляет программу внешнетраекторных измерений, по которым решает задачу согласования космической системы отсчёта с земной системой и вырабатывает поправочную информацию для коррекции бортовой эфемеридной информации. То есть подсистема внешнего контроля выполняет функции обратной связи для бортового контура баллистико-навигационного обеспечения.
3. Подсистема тестирования и непрерывного контроля функционирования космических телекоммуникаций.
4. Подсистема управления телекоммуникационными потоками через борт космического аппарата.
5. Подсистема, отвечающая за исследование трафиков потоков, оптимизацию информационных потоков, коррекцию бортовых алгоритмов.
6. Подсистема управления низковысотными космическими аппаратами объединённой орбитальной группировки.
Принципы управления ГЛОНИС при автономном функционировании:
1. Управление бортовыми подсистемами основывается на принципе супервизорного управления передаточными функциями подсистем. То есть параметрическим управлением бортовых алгоритмов на основе внешнего контроля наземными средствами. По такому принципу функционирует космическая эталонная база, подсистема баллистико-навигационного обеспечения, подсистема дистанционного зондирования и наблюдения из космоса.
В штатном режиме функционирование осуществляется по выходным параметрам, сопоставляемым прямо и косвенно с информацией систем внешнего контроля (режим «чёрного ящика»). При выходе за допустимые границы выходных параметров подсистема переводится в режим детального аппаратного и функционального контроля.
2. Управление функционированием телекоммуникационной подсистемы на основе непрерывного тестового контроля информационных систем, построенного по иерархической структуре поэтапного углублённого контроля, локализации отказов и активного аппаратно-программного восстановления в рамках заложенной в системе структуры ремонтопригодности. Процесс восстановления должен быть построен на принципе программных методов локализации подсистем с восстановлением (коммутацией или перезагрузкой) неисправных элементов «на ходу», без выведения системы из штатного режима эксплуатации.
3. Телеметрический контроль средств и подсистем космических аппаратов осуществляется адаптивной системой бортовой телеметрии, доставляющей обобщённую информацию – в пункт управления и детальную – в центр технологического контроля для перевода объекта в режим восстановления.
На рис. 6 представлена укрупнённая структура перспективной наземно-космической системы ГЛОНИС, где показана функциональная структура управления созданием, эксплуатацией, целевым применением ГЛОНИС, при этом учтены сформулированные выше принципы автономного функционирования двухъярусной многофункциональной космической системы.
Рис. 6. Укрупнённая структура перспективной наземно-космической системы ГЛОНИС.
УПРАВЛЕНИЕ ФУНКЦИОНИРОВАНИЕМ ОРБИТАЛЬНОЙ ГРУППИРОВКИ ИЗ ОДНОГО ЦЕНТРА
При вводе системы ГЛОНИС в штатную эксплуатацию организуется внутрисистемный информационный обмен через собственные спутниковые каналы связи. Пункты контроля и автоматической коррекции принимают информацию с борта каждого космического аппарата и ретранслируют её на пункт управления через собственные каналы связи. При такой организации системы управления, при условии совмещения канала управления с каналом связи, управление системой может организовываться из любого месторасположения пункта управления, оснащённого средствами приёма и аппаратно-программным комплексом управления.
Поэтому наряду с Главным пунктом управления системой ГЛОНИС могут применяться резервные, дублирующие, региональные пункты управления, способные решать как общую задачу управления орбитальной группировки, так и частные целевые, региональные задачи с выведением целевой информации на место (или местность) реального потребителя в реальном масштабе времени.
Для такого многоцелевого применения предусматривается «многостанционный» (многопунктовый) доступ к управлению ресурсами для решения частных задач наблюдения, координатно-временного обеспечения и управления средствами различного назначения, координируемых Главным пунктом управления.
В соответствии с возможными видами решаемых задач может быть предусмотрен унифицированный ряд стационарных и подвижных пунктов управления на различных носителях (автомобиль, вертолёт, самолёт, боевая машина пехоты, корабль и др.).
Принцип однопунктового управления, при котором в рамках Главного пункта сосредоточено управление всеми подсистемами, ресурсами, их распределением и перенацеливанием, предусматривает предоставление сегментов ресурсов и возможности управления ими в распоряжение пользователей и абонентов в рамках их прав и приоритетов. При таком распределении функций управления ресурсами системы между центральным органом управления и многопунктовым пользованием обеспечивается независимое многоцелевое применение системы при сохранении централизованного контроля за функционированием и программной поддержкой заявок на нештатное и нестандартное применение.
Штатное функционирование системы ГЛОНИС в полном объёме её возможностей образуется поэтапным вводом её подсистем. Логика построения системы такова, что ввод системы начинается с одиночного космического аппарата. По мере наращивания орбитальной группировки производится постепенное информационное включение функционирования системы по всем её подсистемам в полном объёме выполняемых задач.
Каждый космический аппарат системы ГЛОНИС по каждой его подсистеме отрабатывается пунктом управления индивидуально наземным комплексом управления. При этом последовательность «запуска» системы в эксплуатацию состоит из следующих этапов. Прежде всего, космический аппарат приводится в активное функционирование автономно и включается в эксплуатацию при частичном выполнении функций. Затем космический аппарат вводится в структуру существующей космической навигационной системы ГЛОНАСС в порядке эволюционной «замены» спутников системы ГЛОНАСС на спутники ГЛОНИС.
При включении космического аппарата он вначале выполняет функции системы ГЛОНАСС в полном объёме, так что потребитель не замечает такой замены. Затем производится групповая отработка функционирования наращиваемых частных группировок, начиная с двух-трёх космических аппаратов. Это позволяет включать полномасштабные функции всех подсистем космических аппаратов в режиме неавтономного функционирования. Дальнейшее наращивание орбитальной группировки наполняет пространственную информационную ёмкость многофункциональной космической системы полностью.
Наконец, производится введение системы ГЛОНИС в полномасштабное автономное функционирование и переход наземного комплекса управления в режим контрольных функций в соответствии с распределением задач между ним и бортовым контуром управления.
Рассмотрим подробнее технологию ввода в эксплуатацию всех космических аппаратов системы ГЛОНИС.
ТЕХНОЛОГИЯ РАБОТЫ С ОДИНОЧНЫМ КОСМИЧЕСКИМ АППАРАТОМ
После выведения космического аппарата в заданную точку производится телеметрический контроль его работоспособности. Затем космический аппарат вводится в эксплуатацию в следующей последовательности:
• организуется эфемеридно-временное обеспечение по традиционной беззапросной наземной технологии и по достижении штатного режима космического аппарата включается в рабочую орбитальную группировку системы ГЛОНАСС;
• на следующем этапе отрабатывается и начинает функционировать система связи, отрабатываются режимы регионального обмена информацией со всеми видами потребителей;
• на последнем этапе отрабатывается и вводится в режим экспериментальной отработки система наблюдения.
Таким образом, одиночный космический аппарат, вводимый на подмену спутников системы ГЛОНАСС, входит в структуру штатной эксплуатации по координатно-временному обеспечению и начинает отработку и частичную эксплуатацию информационных систем в режиме одиночного аппарата.
ТЕХНОЛОГИЯ РАБОТЫ С НЕСКОЛЬКИМИ КОСМИЧЕСКИМИ АППАРАТАМИ
Дальнейшее наращивание орбитальной группировки в одной орбитальной плоскости до двух и более космических аппаратов позволяет после приведения спутника в работоспособное состояние отрабатывать и вводить в эксплуатацию системные и сетевые функции. На первом этапе вводится в работу межспутниковый канал связи, производится сверка часов, измерение взаимных дальностей и астро-визир-наблюдение космического аппарата на фоне звёзд. Далее запускается система автономной навигации и вычисления частотно-временных поправок и вводится в штатную эксплуатацию в автономном режиме.
Вводится в эксплуатацию система связи и информационного обмена в звене двух аппаратов. Система наблюдения отрабатывается в режиме ретрансляции информации через космическую сеть связи. Работа с несколькими космическими аппаратами осуществляется полностью под управлением наземного контура управления, который одновременно отрабатывает автономные функции и переводит спутник в автономный режим.
ТЕХНОЛОГИЯ РАБОТЫ С ПОЛНОЙ ОРБИТАЛЬНОЙ ГРУППИРОВКОЙ
При заполнении первой орбитальной плоскости новыми космическими аппаратами системы ГЛОНИС приводятся в действие системные функции космической эталонной базы, глобальный информационный обмен и система наблюдения. На этом этапе система ГЛОНИС сдаётся в частичную опытную эксплуатацию всем видам пользователей.
Дальнейшее наращивание возможностей, накопление опыта решения целевых задач должно сопровождаться совершенствованием технологии функционирования бортовых систем, введением на борт космических аппаратов новых, заменяющих исходные, алгоритмов и программ обработки. Особенностью штатной эксплуатации многофункциональной системы ГЛОНИС, в отличие от предыдущих космических систем, должно стать её непрерывное совершенствование путём перепрограммирования бортовых систем и наращивания функциональных возможностей.
СТРАТЕГИЯ И ЦЕЛИ РАЗВИТИЯ ГЛОНИС
Космическая индустрия обладает большой инерционностью к восприятию и реализации новых идей. Каждый космический комплекс представляет собой комплекс взаимоувязанных и взаимообусловленных технологий и конструктивных решений, отрабатываемых на длительном временном интервале, предшествующем запуску системы в космос. Цикл разработки космической системы от замысла до запуска и принятия в эксплуатацию измеряется десятилетиями. Лидирующее положение России в космической деятельности можно сохранить при поэтапном переходе на магистральный путь многофункционального построения единой взаимоувязанной информационной орбитальной группировки Российской Федерации, то есть системы ГЛОНИС. На первом этапе целесообразно реализовать эволюционное развитие орбитальной группировки ГЛОНАСС в многофункциональную интегрированную наземно-космическую управляющую систему ГЛОНИС.
Направления развития космической деятельности, закрепляющие лидирующее положение РФ в мире, представляются следующими:
1.Сохранение и развитие космической связи как массового глобального явления только на пути конвергенции с системами мобильной связи всех поколений в рамках средневысотной сетевой интегрированной системы.
2.Технологии космического координатно-временного обеспечения, разрабатываемые в России, позволят повысить точность космической хронометрии и координатометрии на 1,5-2 порядка.
3.Интеграция технологий космического координатно-временного обеспечения на средневысотном уровне космических аппаратов и технологий мобильных систем связи всех поколений позволит России создать глобальную наземно-космическую систему, опережающую на десятилетие развитие мировых навигационно-связных систем. Это создаст глобальный радиодоступ, независимый от развития наземных систем связи.
4.Комплексная интеграция навигационно-связных прорывных технологий с информационными технологиями дистанционного зондирования Земли позволит России занять лидирующее положение в мире при своевременной конвергенции моноцелевых космических систем в единую многофункциональную группировку системы ГЛОНИС.
Разработка концепции и системного проекта единой многофункциональной наземно-космической информационной системы России ГЛОНИС, её создание и развитие на основе международного сотрудничества в 2014–2020 г.г. позволит космической индустрии России определить генеральную стратегию развития и сконцентрировать усилия на основных направлениях её развития.
ЗАМЫСЕЛ
Используя настоящий момент глобального взрывного революционного развития мировых телекоммуникационных и информационных технологий, а также возможность интеграции российских технологий космического координатно-временного обеспечения с мировыми достижениями мобильной связи в процессе её становления, можно вывести космическую индустрию России в следующий цикл технологического развития, опережая на десятилетия передовые страны мира.
Успехи и востребованность космической деятельности будут зависеть от роли космических средств и технологий в той или иной сфере жизни человека. Ориентация на принцип многофункционального мультисервисного обслуживания социальной деятельности России позволяет предложить системные решения по предоставлению услуг различным сферам деятельности, на основе чего должен быть разработан и представлен на государственное утверждение проект социального заказа на космическую деятельность.
Особенность предлагаемой концепции разработки ГЛОНИС заключается в одновременном задании технических условий не только промышленности для разработки технологических основ, но, в не меньшей степени, и заказчику системы ГЛОНИС на разработку системных основ теории и практики её применения с последующим совершенствованием и развитием на всём временном интервале её эксплуатации.
При таком методе проектирования ГЛОНИС заказчик должен затем возглавить создание, дальнейшее сопровождение и эксплуатацию космической системы.
Центральным элементом создания перспективной интегрированной многофункциональной обслуживаемой (эксплуатируемой) системы является орбитальная группировка системного уровня, образуемая многофункциональными космическими аппаратами. Системообразующим функциональным элементом, обеспечивающим наиболее выгодное комплексирование представленных функций, является высокоточное астрозвёздное координатно-временное обеспечение и глобальная частотно-временная синхронизация в рамках всей орбитальной группировки [5].
Сформулированные выше принципы построения эксплуатации обслуживаемой космонавтики логически выстраивают компактную систему единого наземно-космического комплекса и могут базироваться на развитии авиационно-космической системы на базе авиационно-ремонтного завода АРЗ-360 (Рязань).
Особенностью предлагаемого проекта является опережающая разработка теории построения и применения подсистем ГЛОНИС в рамках поэтапной экспериментальной отработки в наземном и лётном эксперименте. При создании ГЛОНИС необходимо опираться на вышеперечисленные российские технологии и оборудование, созданное за последние десятилетия.
ВЫВОДЫ
Создание компактного научно-промышленного центра обслуживания космической части системы ГЛОНИС будет отвечать условиям наивысшего уровня технико-экономической эффективности на государственном и национальном уровне. Управление полётом авиационно-космической системы и выполнение всех операций в космосе будет осуществляться в единой системе средств связи и управления в существующей и развиваемой структуре управления полётами космических аппаратов.
Артем Сергеевич Аджемов, д.т.н., профессор, ректор Московский технический университет связи и информатики (МТУСИ);
Сергей Львович Мишенков, д.т.н., профессор;
Николай Исаакович Смирнов, д.т.н., профессор;
Владимир Дмитриевич Кусков, к.т.н., действительный член Российской академии космонавтики им. К.Э. Циолковского (РАКЦ);
Елена Львовна Новикова, член-корреспондент РАКЦ.ЛИТЕРАТУРА:
1.Н.И. Смирнов, В.Д. Кусков, Ю.А. Караваев, Е.Л. Новикова. Концепция построения глобальной спутниковой системы связи, навигации, мониторинга // Доклады Второй отраслевой НТК «Технологии информационного общества». – М.: ООО «НД Медиа Паблишер», 2008 г.
2.С.Л. Мишенков, Н.И. Смирнов, С.В. Мельник, Е.Н. Петрова. Перспектива использования модернизируемой навигационной спутниковой системы ГЛОНАСС в качестве многофункциональной спутниковой системы // T-Comm. Системы подвижной связи и цифрового телерадиовещания. – № 9, 2011 г.
3.В.Д. Кусков, Е.Л. Новикова. Будущее космонавтики – в интеграции // Российский космос. – М.: 2006 г. – № 5.
4.В.Д. Шаргородский, А.А. Федотов, В.В. Пасынков, А.Н. Жуков и др. Система высокоточного определения эфемерид и временных поправок // Межотраслевой журнал навигационных технологий: Вестник ГЛОНАСС. Спецвыпуск. Октябрь 2012 г.
5.А.С. Аждемов, С.Л. Мишенков, Н.И. Смирнов, В.Д. Кусков, Е.Л. Новикова. Перспективы создания системы распределения сигналов точного времени на основе космической навигационной системы ГЛОНАСС // T-Comm. Телекоммуникации и транспорт. – № 5, 2010 г.
6.А.С. Аджемов, С.Л. Мишенков, Н.И. Смирнов, В.Д. Кусков, Е.Л. Новикова. О проектировании в России обслуживаемой глобальной наземно-космической информационной системы ГЛОНИС. Сборник докладов международного научно-технического семинара «Системы синхронизации формирования и обработки сигналов в инфокоммуникациях», «СИНХРОИНФО 2013», 2 июля 2013 г., г. Ярославль.
Полная версия статьи опубликована в журнале "Вестник ГЛОНАСС" Декабрь, 2013 №4 (15)Перепечатка в полном или частичном виде возможна с обязательной активной ссылкой на источник vestnik-glonass.ru